-
 2024-08-08 Industry News
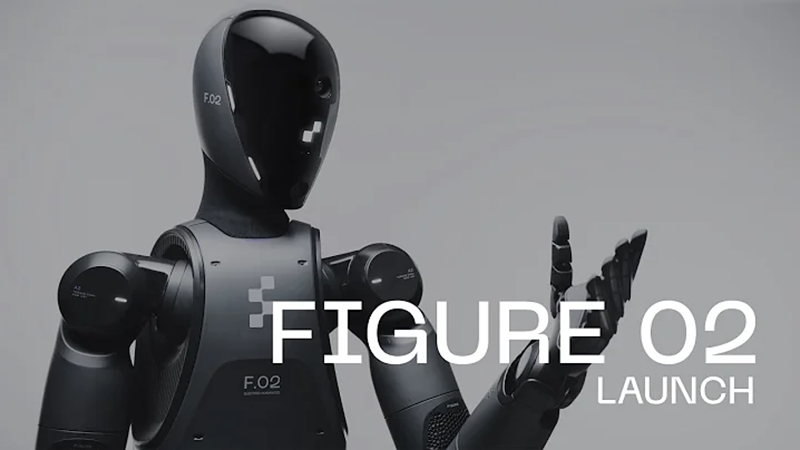
2024-08-08 Industry NewsThe Future is Here: Figure 02 Robot Pioneers a New Era in AI Hardware
-
 2023-12-15 Products News
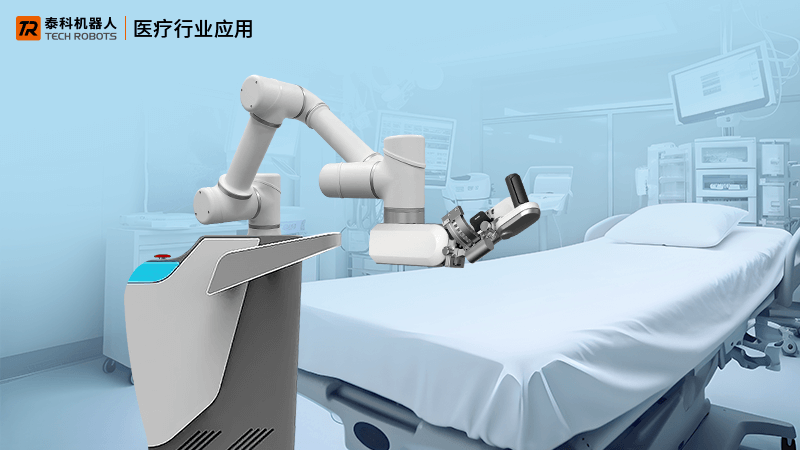
2023-12-15 Products NewsPromising Future! Tech Robots’ Cobots Fully Expand into the Medical and Healthcare Industry
-
 2023-12-08 Industry News
2023-12-08 Industry NewsEnable robots to achieve development freedom and explore precision craftsmanship with robotic joint modules.
-
 2023-11-27 Products News
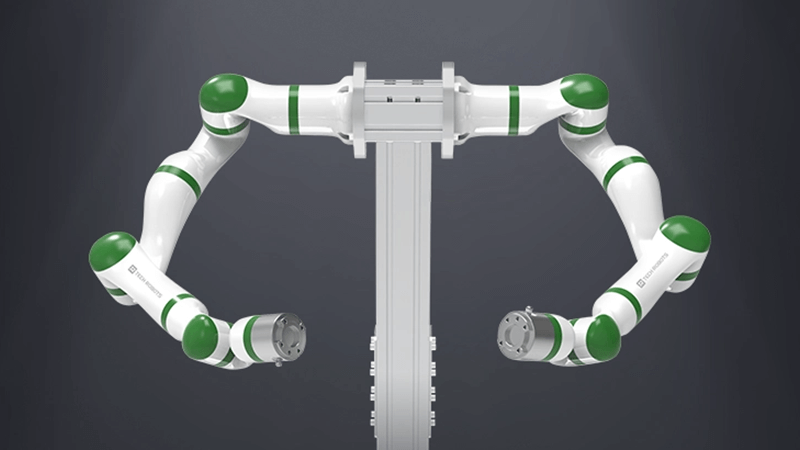
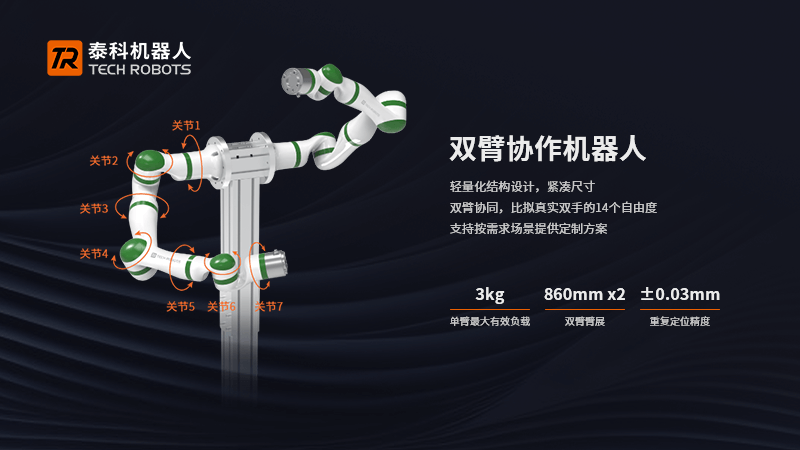
2023-11-27 Products NewsAnnual masterpiece, Tech Robots DR series dual-arm collaborative robot officially hits the market!
-
 2023-11-22 Industry News
2023-11-22 Industry NewsThe Emergence and Application of the New Era in Smart Healthcare: The Rise of the Dual-Arm 14-Axis Collaborative Robot
-
 2023-11-20 Products News
2023-11-20 Products NewsNavigating the humanoid robot track, Tech Robots launches a heavyweight joint module
-
 2023-11-02 Company News
2023-11-02 Company NewsTransformation Journey! Tech Robots Brand Visual Identity (VI) and Official Website Fully Upgraded
-
 2023-10-19 Products News
2023-10-19 Products NewsTech Robots’ RJSIIZ series articulated modules contribute to breakthroughs in smart medical technology
-
 2023-08-14 Company News
2023-08-14 Company NewsEmphasizing professionalism! The Tech Robots Training Season and Internal Trainer Selection Event are officially underway.
-
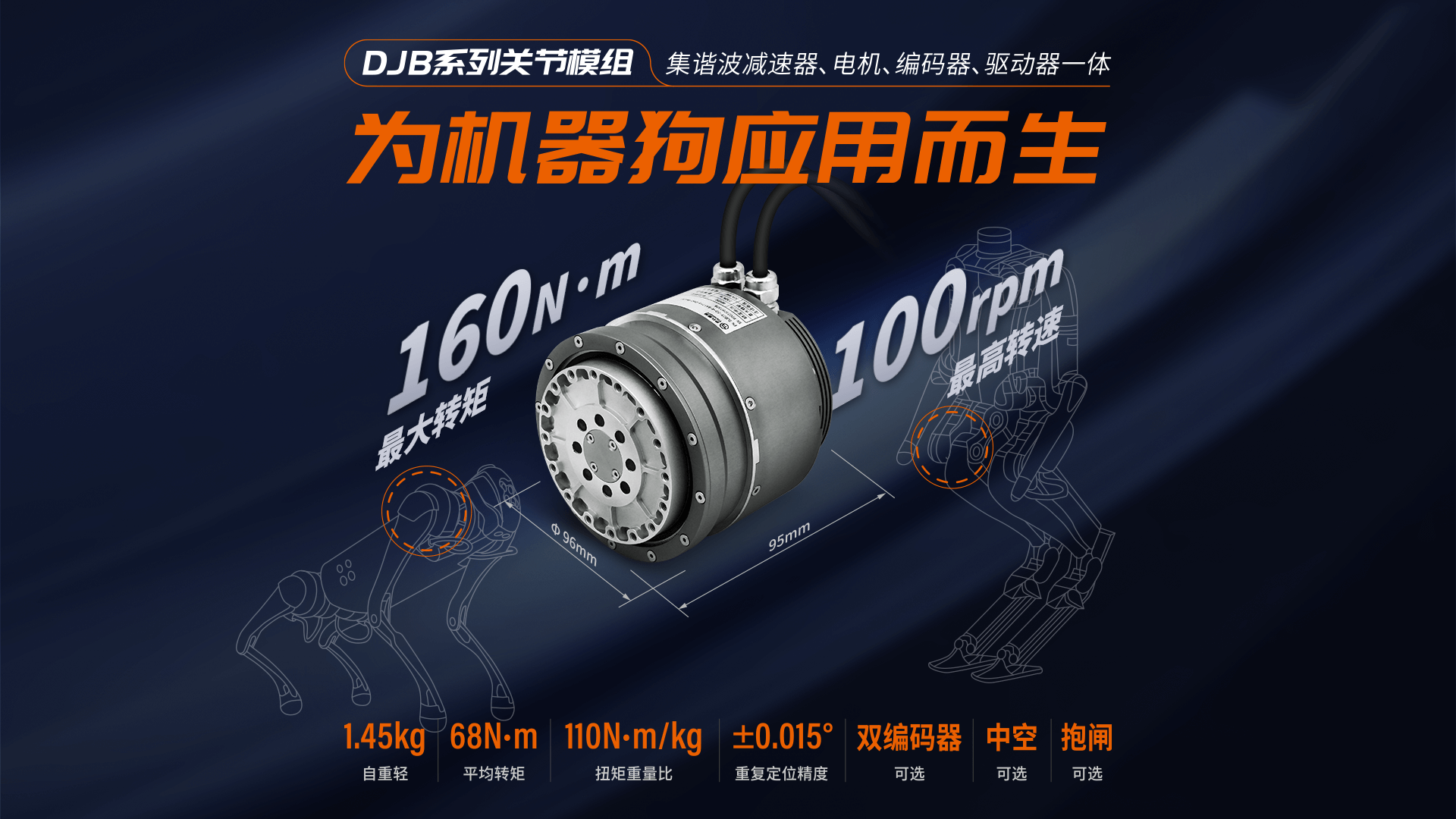 2023-07-24 Products News
2023-07-24 Products NewsTec Robots’ DJB series joint modules empower continuous innovation in biomimetic robots
-
 2023-07-07 Industry News
2023-07-07 Industry NewsRobots are playing a significant role in advancing the new energy industry
-
 2023-07-03 Company News
2023-07-03 Company NewsEmbarking on a new journey after 15 years, let’s jointly innovate and create a future!