
RJSIIZ Series Actuator
Newly Upgraded• Shell-less, highly integrated, compact design.
• Customers can customize the appearance according to their needs.
• Outstanding performance, high reliability, and wide applicability.
• Powerful output, with a selectable maximum torque range of 50-1500N·m.
• Protection level IP54 (optional IP65), suitable for harsh working environments.
• Provide customized services for products and solutions.
Application ScenariosSpecific Cases >
Collaborative Robots, Medical Robots, Precision Turntables, Automation Equipment, etc
- 0.9kgSelf-Weight
- 62mmMinimum Diameter
- 557N·mMaximum Average Load Torque
- <60arcsecRepeatability
- 5000+Shipping Volume

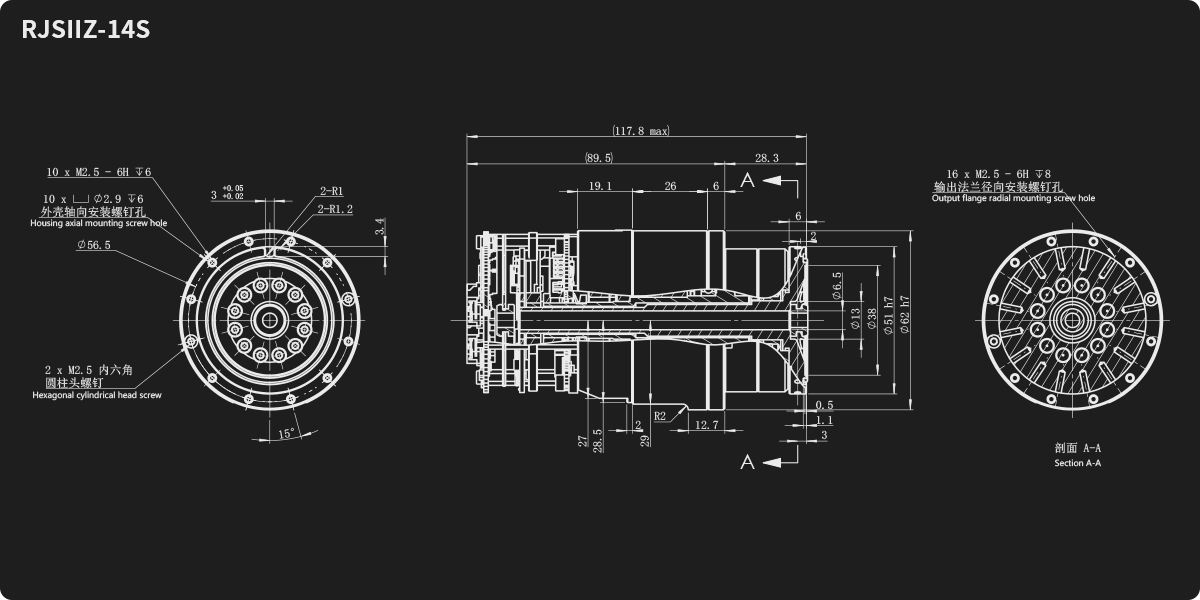
RJSIIZ-14S
Diameter: 62mm
Weight: 0.9kg
Average load torque: 10.5N·m
Rated speed: 30rpm

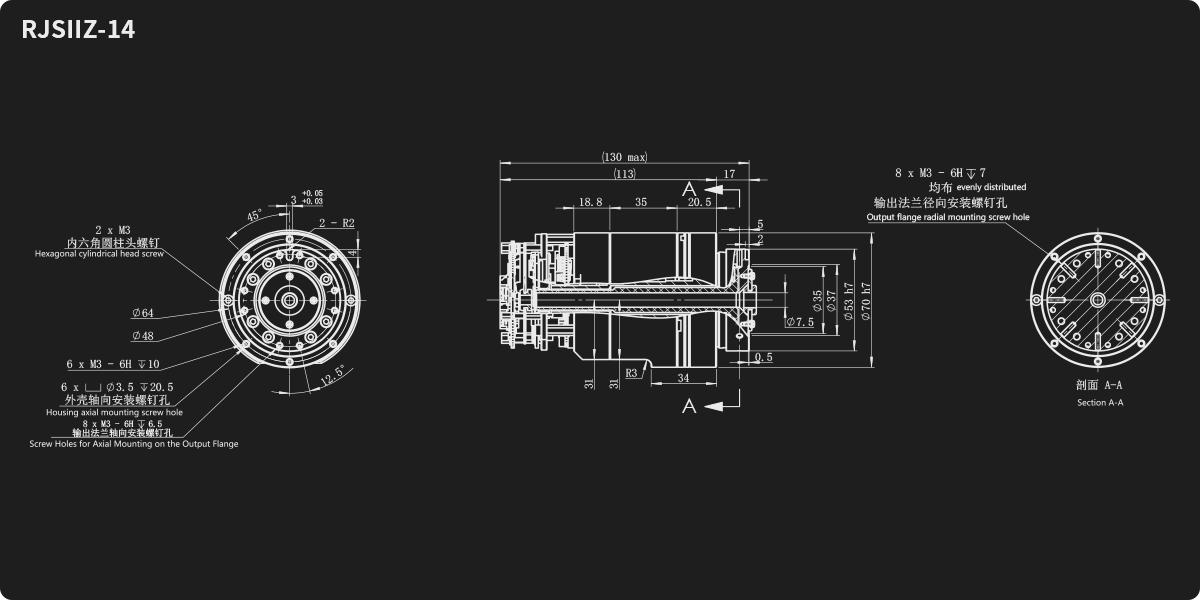
RJSIIZ-14
Diameter: 70mm
Weight: 1.0kg
Average load torque: 13.5N·m
Rated speed: 30rpm
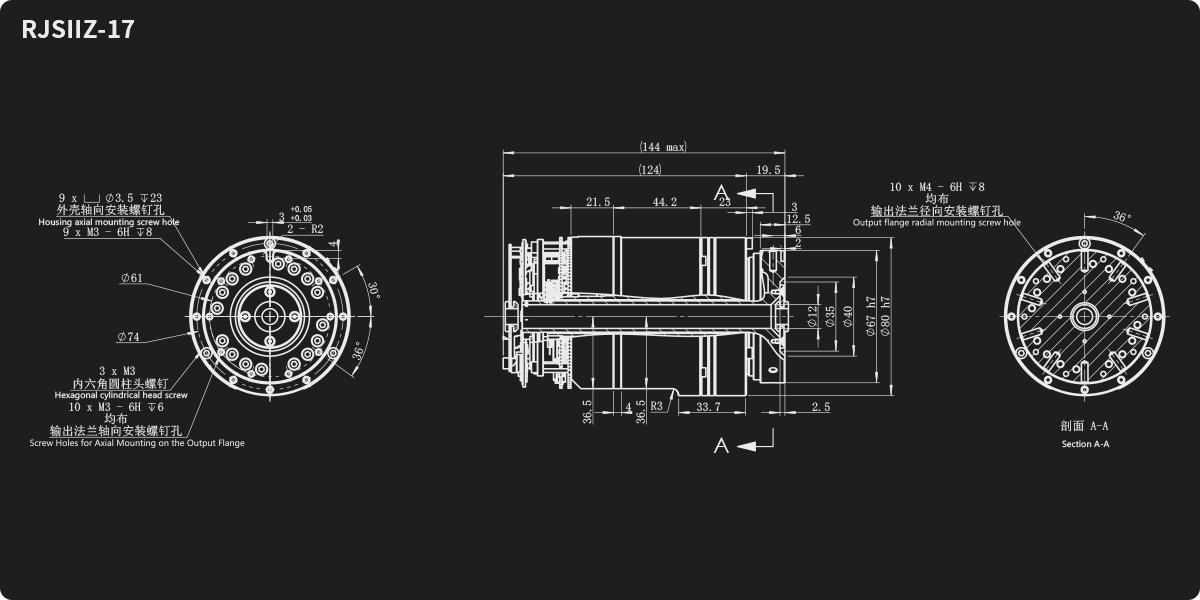
RJSIIZ-17
Diameter: 80mm
Weight: 1.9kg
Average load torque: 49N·m
Rated speed: 20rpm

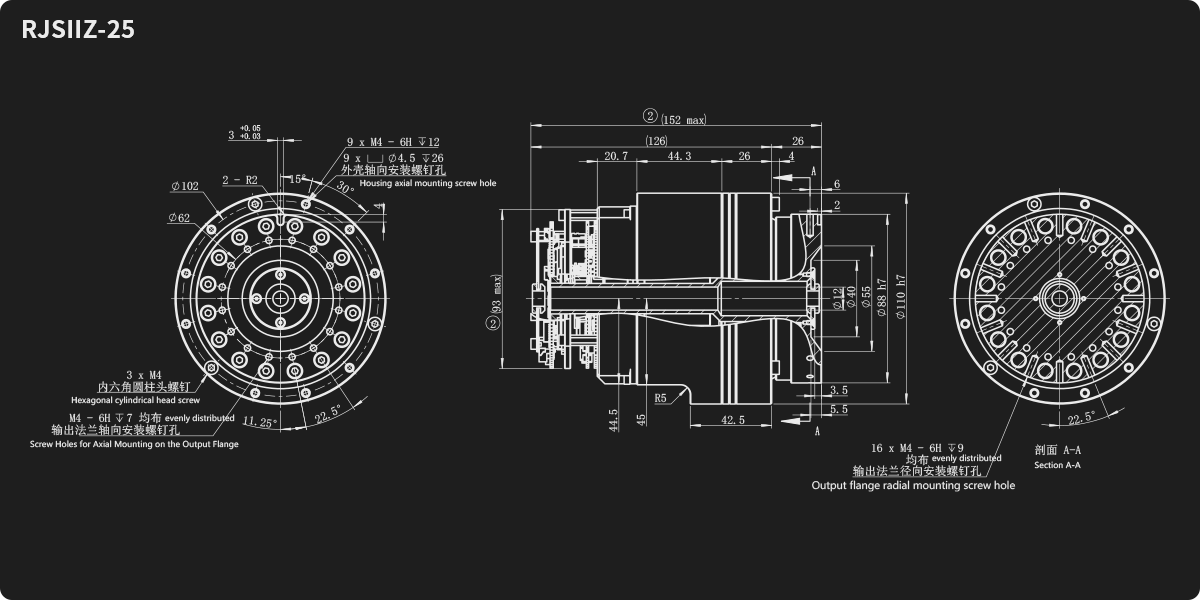
RJSIIZ-25
Diameter: 110mm
Weight: 3.4kg
Average load torque: 133N·m
Rated speed: 24.8rpm
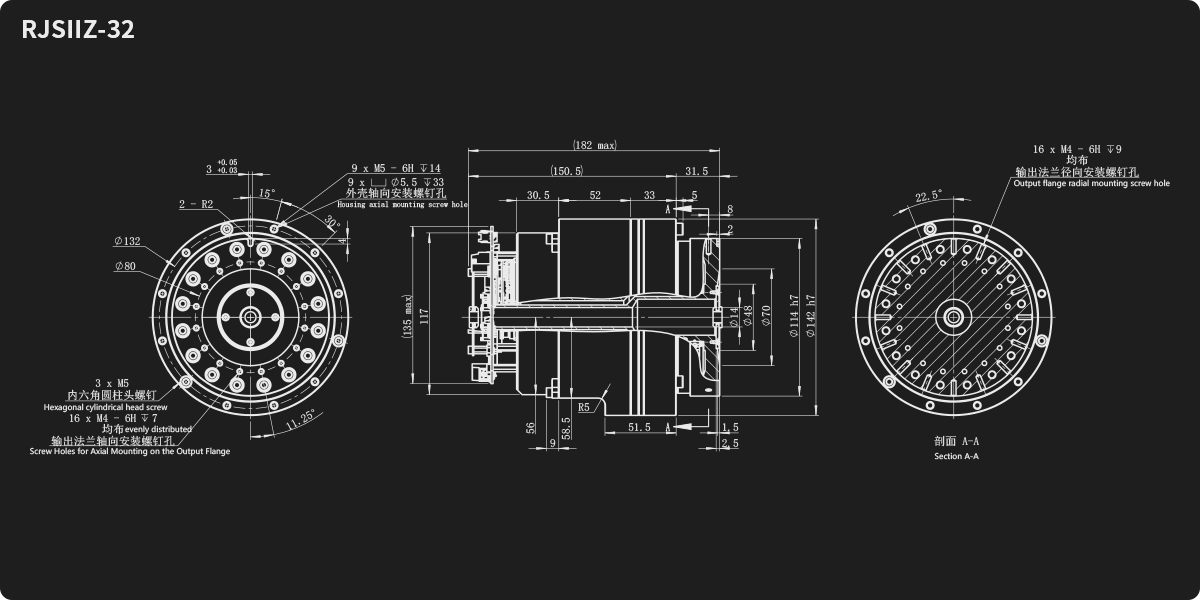
RJSIIZ-32
Diameter: 142mm
Weight: 5.9kg
Average load torque: 267N·m
Rated speed: 12.4rpm

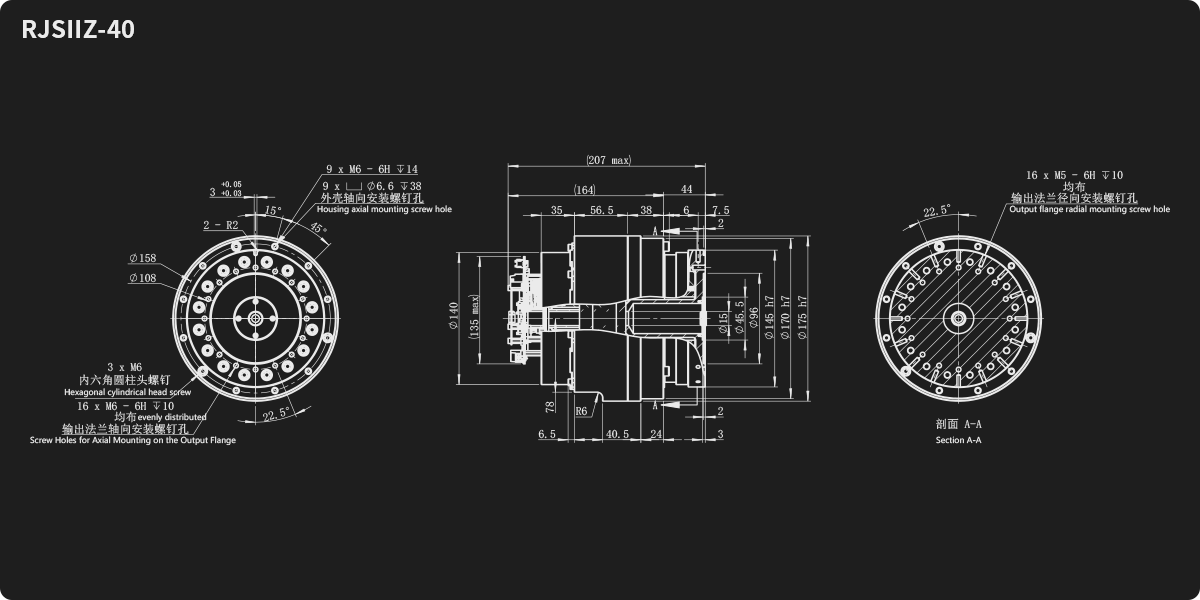
RJSIIZ-40
Diameter: 175mm
Weight: 12kg
Average load torque: 557N·m
Rated speed: 16.5rpm
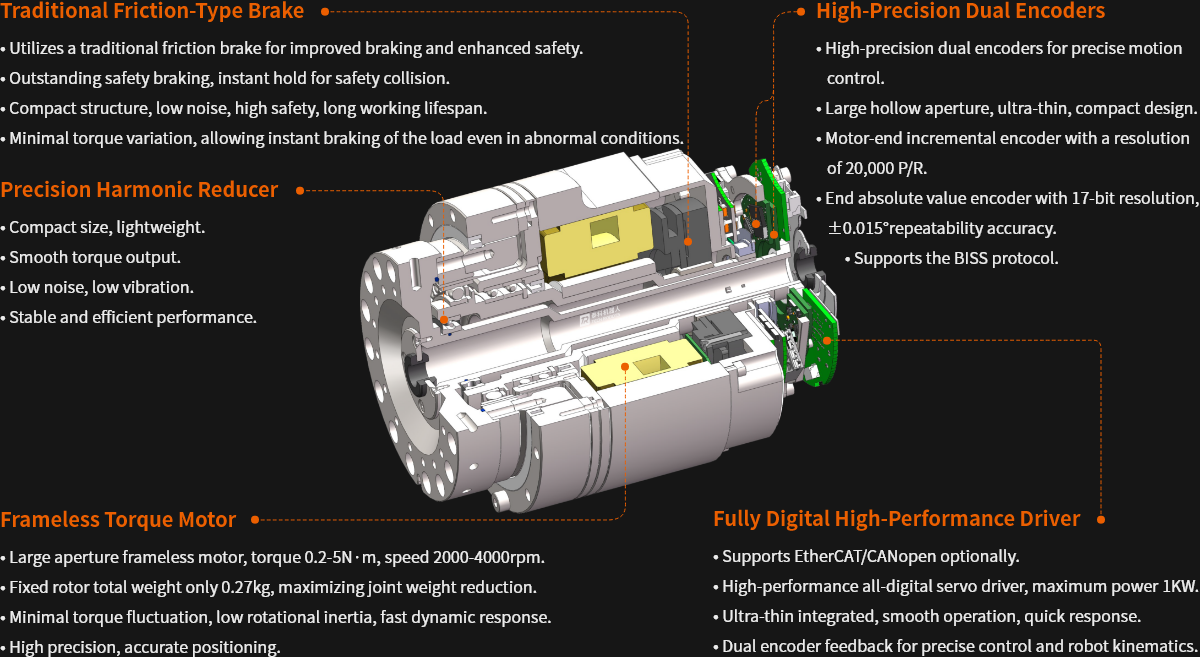
Powerful Performance Derived From Precision Design
Compact and precise design offers more space for robot applications. Customers can position it freely based on their product direction
Technical Specifications
Specifications
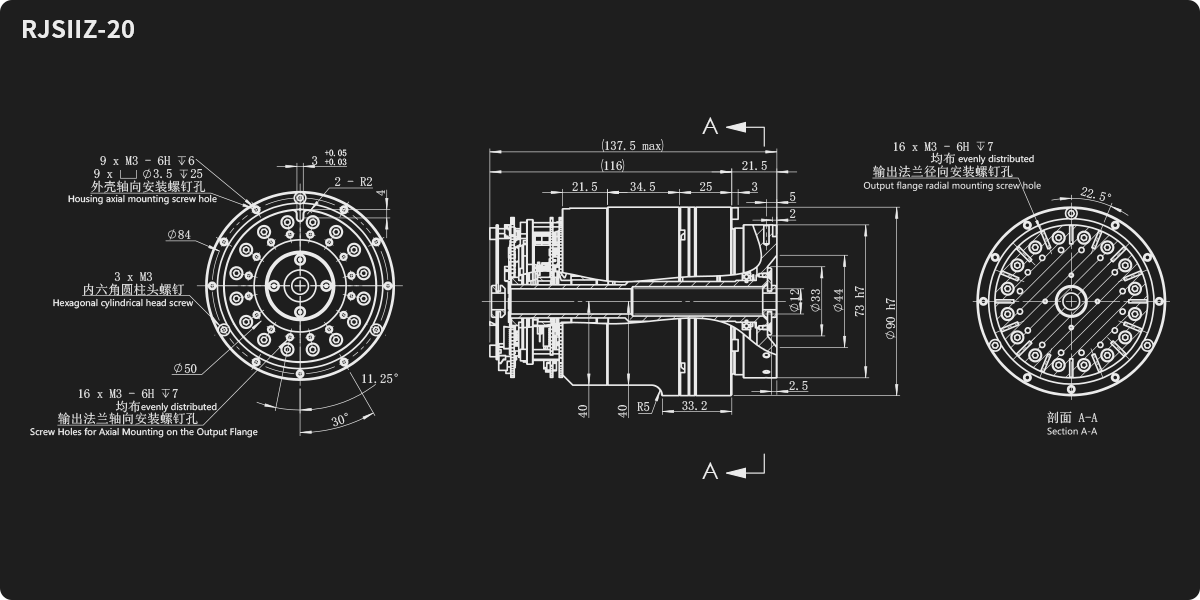
Drawings
| Category | Unit | RJSIIZ-14S | RJSIIZ-14 | RJSIIZ-17 | RJSIIZ-20 | RJSIIZ-25 | RJSIIZ-32 | RJSIIZ-40 |
| Parameters of Harmonic Drive Reducer | ||||||||
| Reduction Ratio | -- | 100 | 101 | 101 | 101 | 101 | 121 | 121 |
| Gearbox Backlash | arcsec | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Transmission Accuracy | arcmin | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Average Lifespan | Hour | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 |
| Output Capability | ||||||||
| Permissible Starting and Stopping Torque | N·m | 26 | 34 | 66 | 102 | 194 | 436 | 762 |
| Average Load Torque | N·m | 10.5 | 13.5 | 49 | 61 | 133 | 267 | 557 |
| Maximum Instantaneous Torque | N·m | 51 | 66 | 134 | 182 | 351 | 848 | 1458 |
| Maximum Allowable Bending Torque | N·m | 20 | 41 | 72 | 140 | 243 | 460 | 600 |
| Rated Speed | rpm | 30 | 30 | 20 | 29.7 | 24.8 | 12.4 | 16.5 |
| Maximum Speed | rpm | 55 | 45 | 29 | 39.6 | 31.4 | 15.5 | 20 |
| Repeatability | arcsec | <60 | <60 | <60 | <60 | <60 | <60 | <60 |
| Absolute Positioning Accuracy | arcsec | <200 | <200 | <200 | <200 | <200 | <200 | <200 |
| Servo System | ||||||||
| Motor Power | W | 65 | 129 | 148 | 282 | 400 | 750 | 1050 |
| Rated Voltage | VDC | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| Rated Current | A(rms) | 3.6 | 4.8 | 5.7 | 10.9 | 11.5 | 20 | 33.7 |
| Peak Current | A(rms) | 10.8 | 14.4 | 17.1 | 27.25 | 28.75 | 40 | 67.4 |
| Incremental Encoder | P/R | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 |
| Absolute Encoder | Bit | 17 | 17 | 17 | 17 | 17 | 17 | 17 |
| Communication Protocol | -- | EtherCAT / CANopen | ||||||
| Dimensions | ||||||||
| Diameter | mm | 62 | 70 | 80 | 90 | 110 | 142 | 175 |
| Length | mm | 89.5 | 113 | 124 | 116 | 126 | 150.5 | 164 |
| Through Hole Diameter | mm | 6.5 | 7.5 | 12 | 12 | 12 | 14 | 15 |
| Weight | kg | 0.9 | 1.0 | 1.9 | 2.5 | 3.4 | 5.9 | 12 |
| Other Specification | ||||||||
| Brake | 24/12VDC Electromagnetic Friction Type | |||||||
| IP Degree | IP54(IP65 optional) | |||||||
| Operating Environment | Operating Temperature: 0 to 50°C (Optional: -40 to 60°C), Storage Temperature: -40 to 80°C, Ambient Humidity: 90% Relative Humidity (Non-condensing) |
|||||||
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.
RJSIIZ Series Actuator Model Description
| RJSIIZ | -32 | -160 | -31 | B2 | -SA17 | -D6 | E | -C1 |
| Series | Model | Gear Ratio | Stator Length | Brake | Absolute Value Encoder | Drive Model | Default Communication Config. | Version Number |
| Straight Cylindrical Joint | 14S | 100-1:101 | 10 | B2:Electromagnetic Friction - Traditional Brake | S:Single Turn M:Multi-Turn A:Absolute Value 17:Encoder Single-Turn Resolution |
D1: RDM
D3: RDM2
D4: RTM08
D5: MJA14-RGT
D6: RGT
D10: MJA14-RDM
|
E: EtherCAT
C: CANopen
R: 485
|
C1:Design Version Number |
| 14 | 20 | |||||||
| 17 | 120-1:121 | 25.2 | ||||||
| 20 | 15.3 | |||||||
| 25 | 27 | |||||||
| 32 | 160-1:161 | 31 | ||||||
| 40 | 25 |
ExampleModel:
