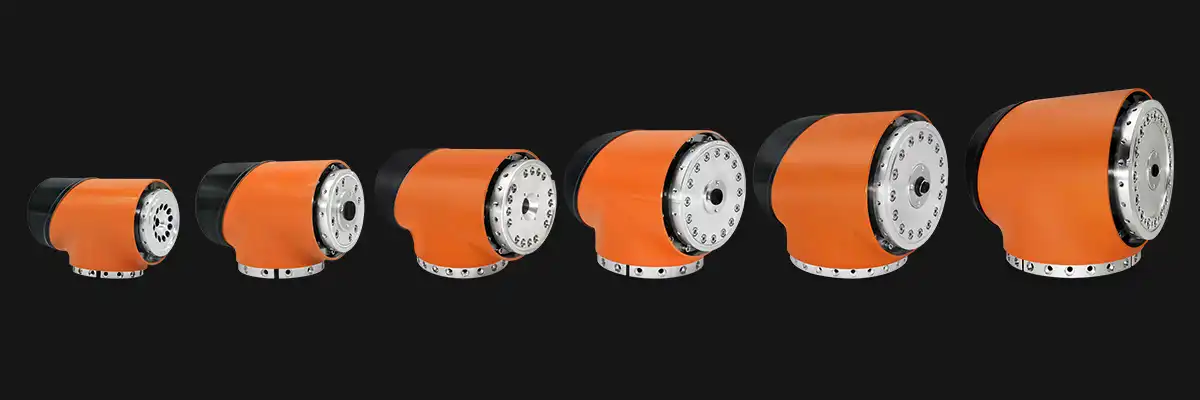
Six-Axis Cobot
BestsellerTB6 Series
• Techrobots' classic cobot products offer customized product and solution services.
• Collaborative work is safe and reliable with collision detection feature.
• Modular design for rapid assembly/disassembly, easy maintenance, and part replacement.
• Compact design, installable at any angle, with flexible deployment and ease of use.
• Advanced drag-and-teach and collision detection features.
• Utilizes EtherCAT bus for anti-interference and fast communication speed.
• Features joint force sensors (TB6-PRO series) for precise tactile control.
Application ScenariosSpecific Cases >
Factory Automation, Lithium Battery, Photovoltaics, Energy Storage, Automotive, 3C Electronics, Medical, Power, Logistics, Chemicals, Research, Education, Biochemistry, Agriculture, Food, New Retail, and more
- 11.5kgMinimum Weight
- 20kgMaximum Payload
- ±0.05mmMinimum Repeatability
- 1500mmMaximum Reach
- 2000+Delivery Quantity
-

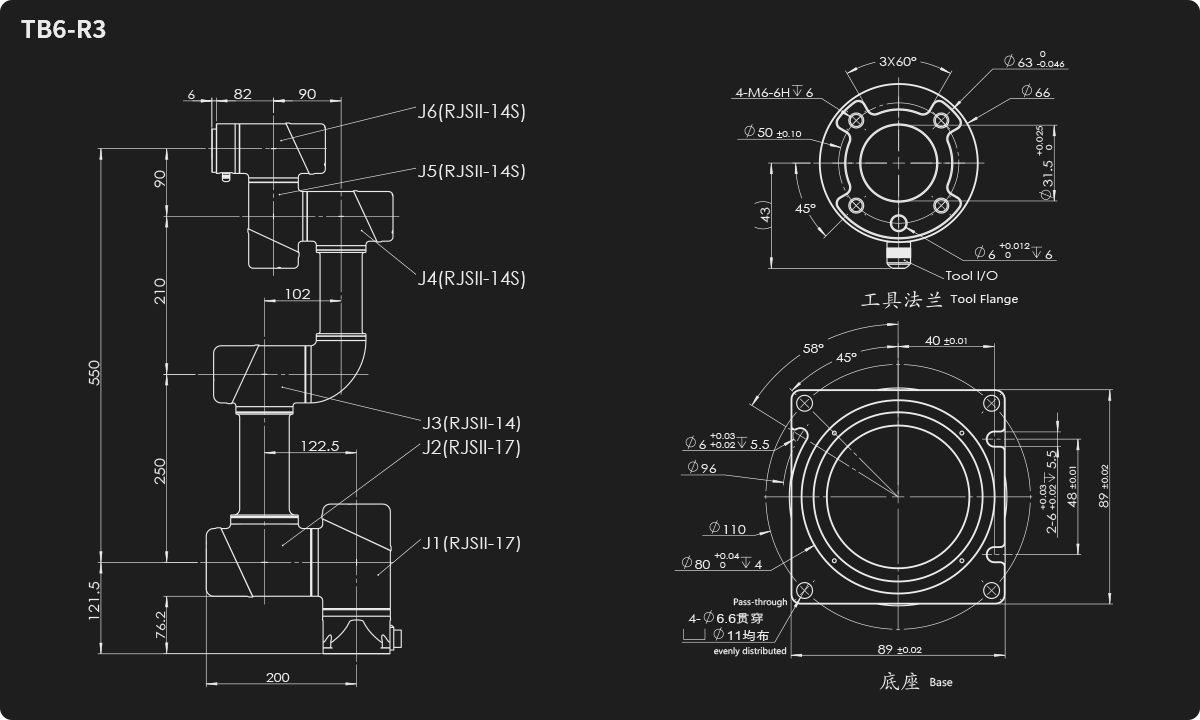
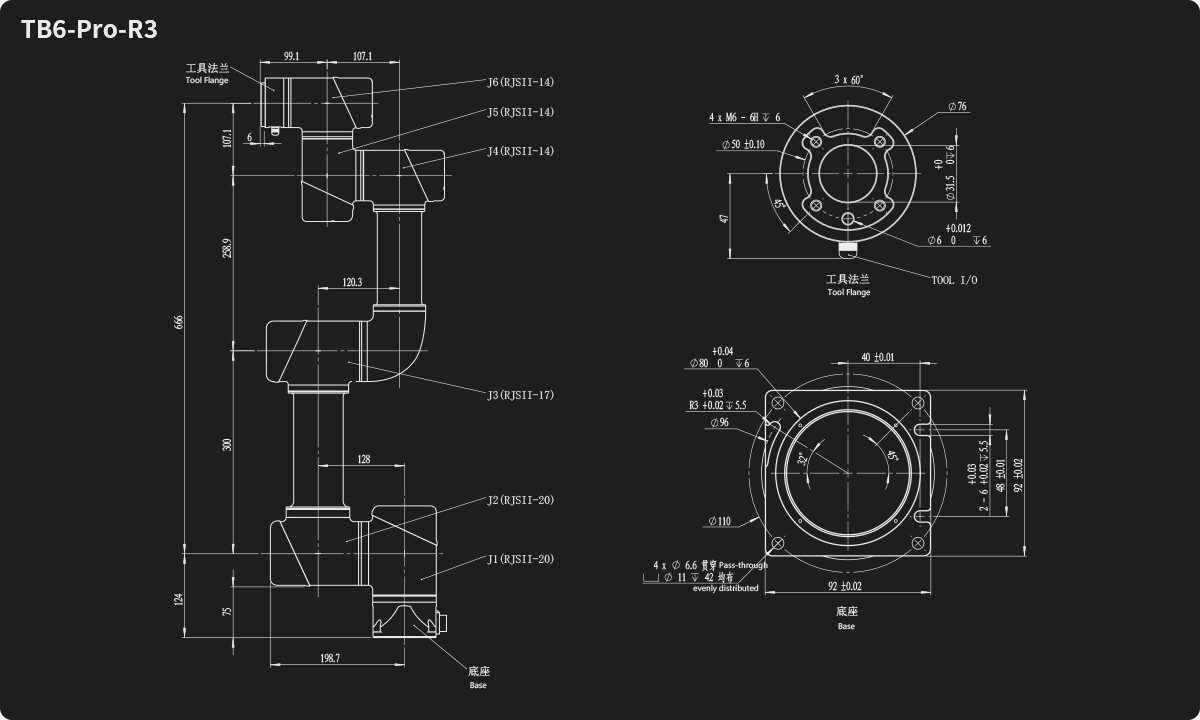
TB6-R3
Payload:3kg
Working Radius:550mm
Repeatability:±0.05mm -

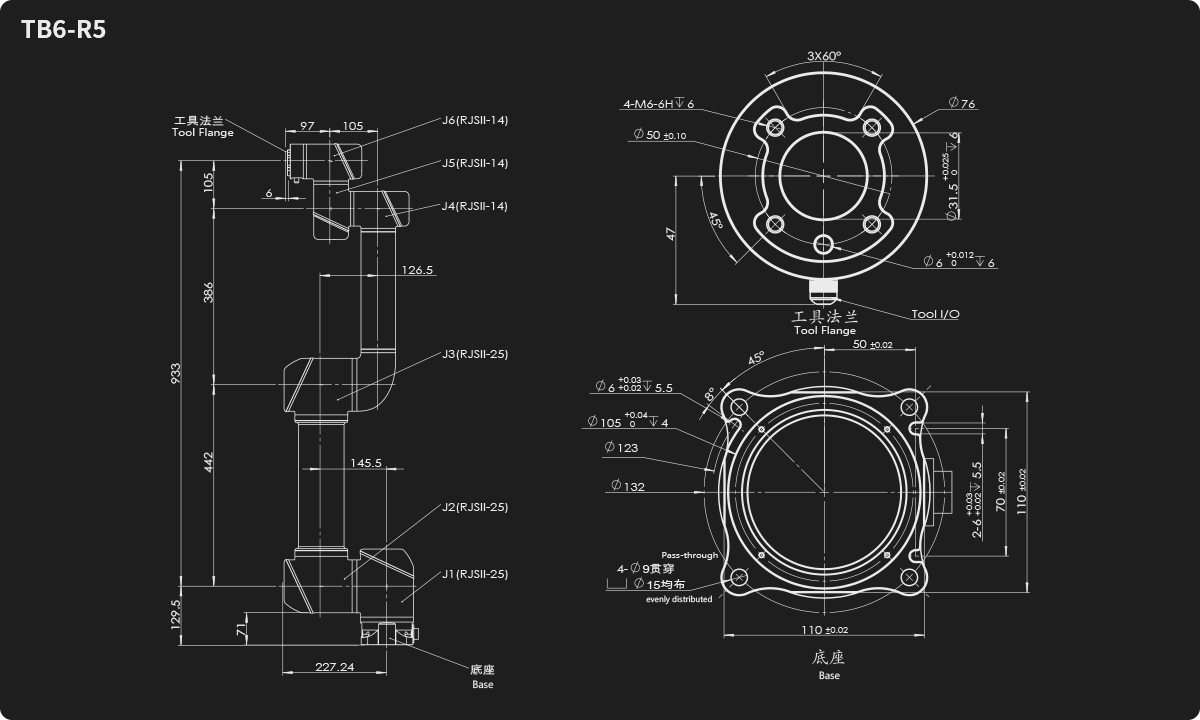
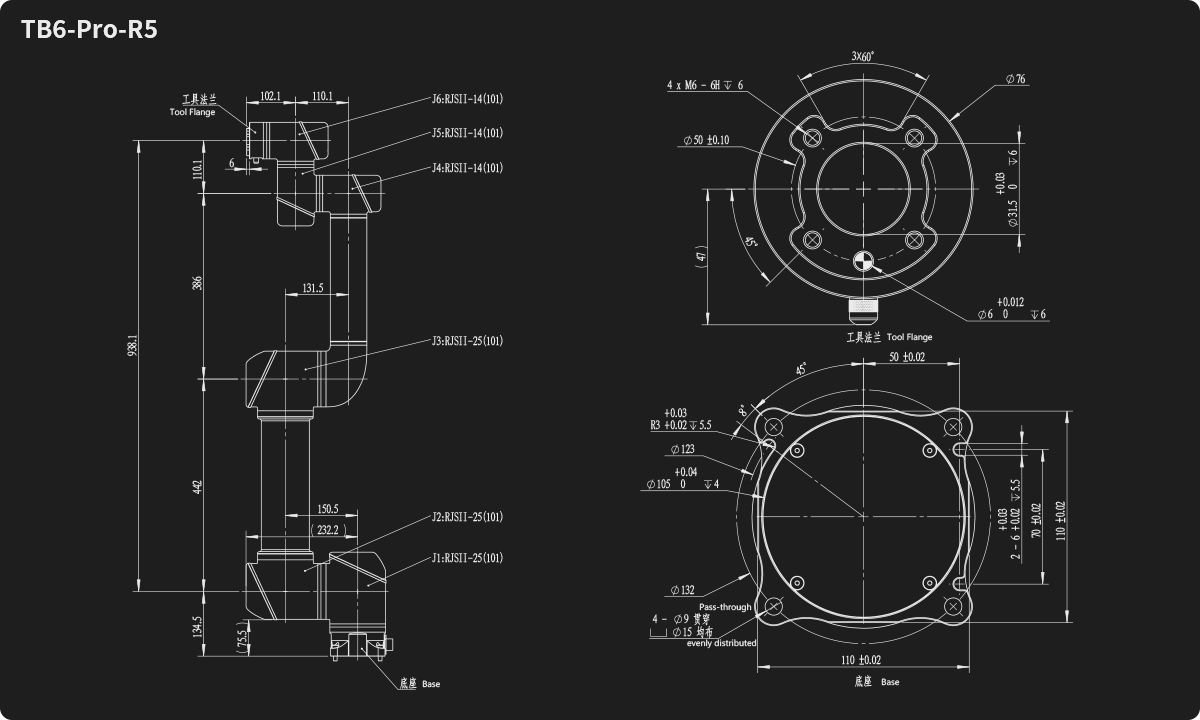
TB6-R5
Payload:5kg
Working Radius:933mm
Repeatability:±0.05mm -

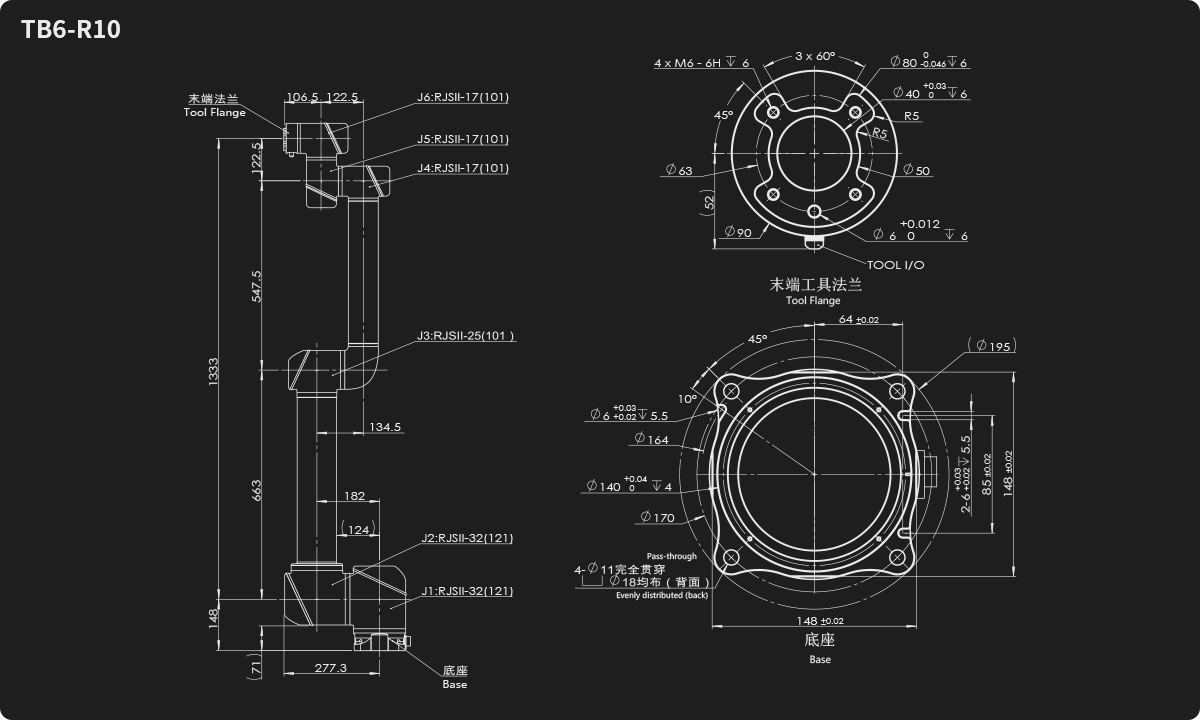
TB6-R10
Payload:10kg
Working Radius:1333mm
Repeatability:±0.08mm -

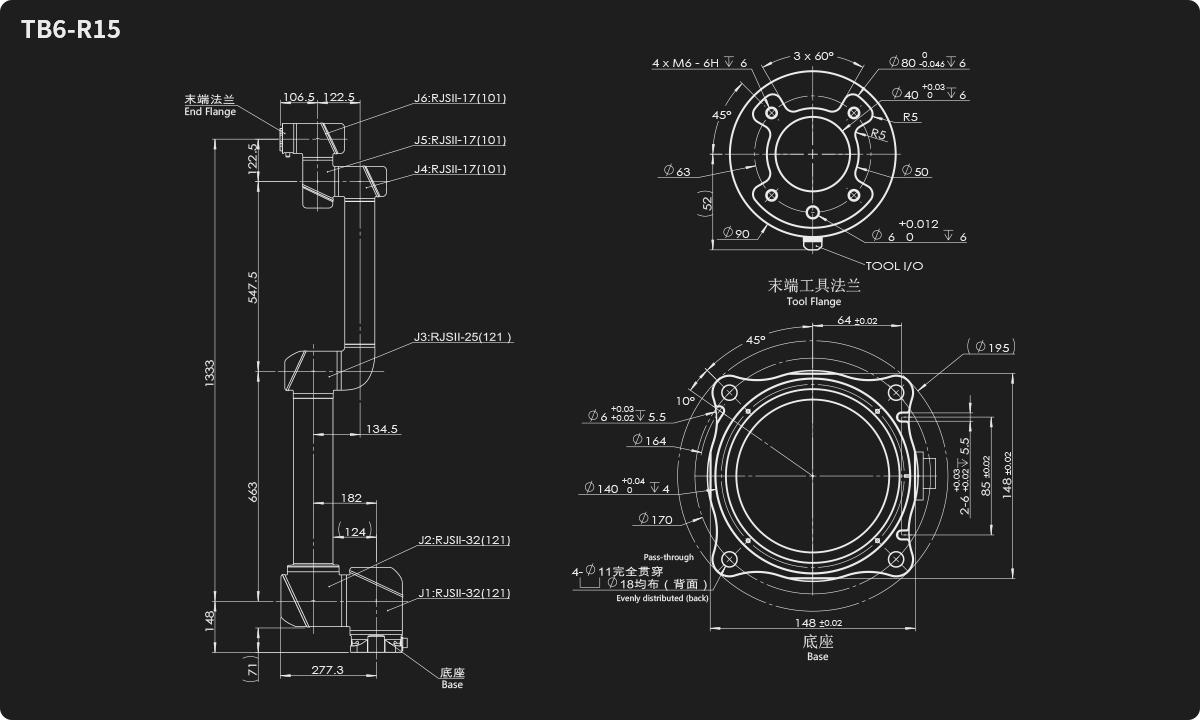
TB6-R15
Payload:15kg
Working Radius:1333mm
Repeatability:±0.1mm -

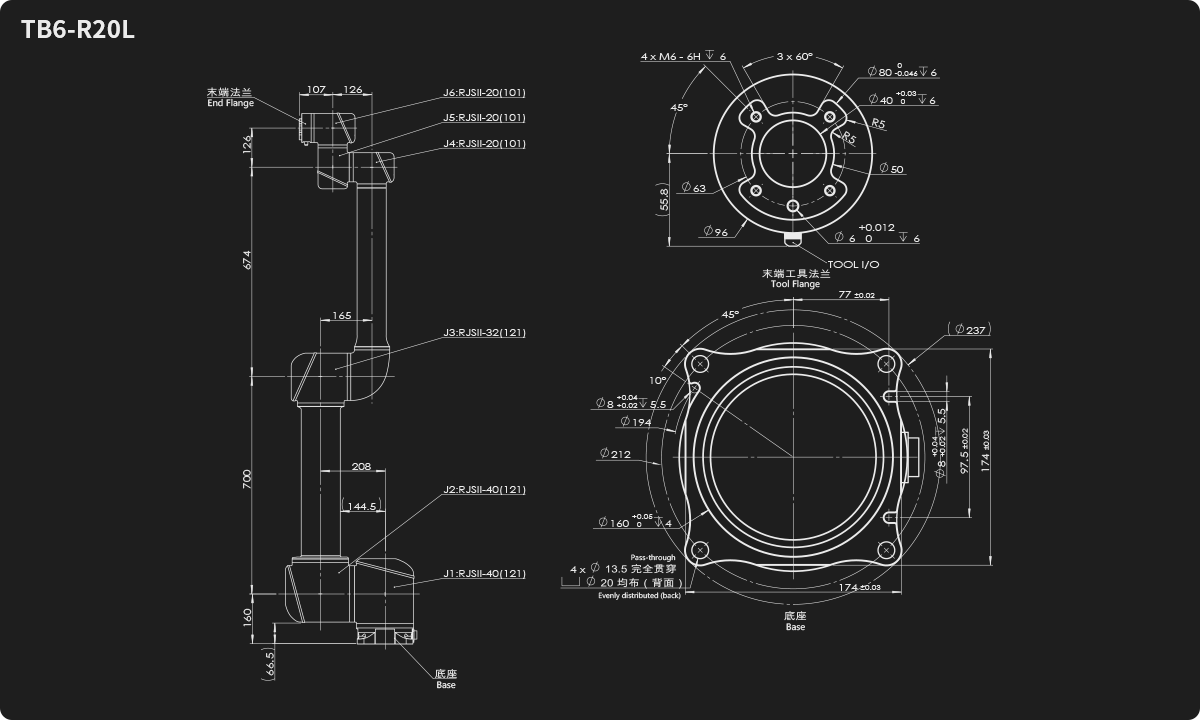
TB6-R20L
Payload:20kg
Working Radius:1500mm
Repeatability:±0.1mm
Introduction Video of Six-Axis Collaborative Robot
Technical Specifications
| Product Features | |||||
| Model | TB6-R3 | TB6-R5 | TB6-R10 | TB6-R15 | TB6-R20L |
| Payload | 3kg | 5kg | 10kg | 15kg | 20kg |
| Repeatability | ±0.05mm | ±0.05mm | ±0.08mm | ±0.1mm | ±0.1mm |
| Self-weight | 11.5kg | 25kg | 37kg | 37kg | 60kg |
| Working Radius | 550mm | 933mm | 1333mm | 1333mm | 1500mm |
| Degrees of Freedom | 6 | 6 | 6 | 6 | 6 |
| Programming | Performed through the graphical user interface on an 8-inch touchscreen teach pendant | ||||
| Collaborative Operation | Compliant with ISO 10218-1:2011 for collaborative operation, featuring safety functions such as "Safe Limited Speed," "Teach-by-Demonstration," and "Power and Force Limiting," among other collaborative robot safety features. |
||||
| Joint Parameters | |||||
| Working Range | J1:±180° J2:±180° J3:±155° J4:±180° J5:±180° J6:±180° |
J1:±180° J2:±180° J3:±164° J4:±180° J5:±180° J6:±180° |
J1:±175° J2:±175° J3:±164° J4:±175° J5:±175° J6:±175° |
J1:±180° J2:±180° J3:±165° J4:±180° J5:±180° J6:±180° |
J1:±180° J2:±180° J3:±166° J4:±180° J5:±180° J6:±180° |
| Maximum Speed | J1:180°/s J2:180°/s J3:180°/s J4:300°/s J5:300°/s J6:300°/s |
J1:150°/s J2:150°/s J3:150°/s J4:180°/s J5:180°/s J6:180°/s |
J1:100°/s J2:100°/s J3:130°/s J4:160°/s J5:160°/s J6:160°/s |
J1:100°/s J2:100°/s J3:100°/s J4:160°/s J5:160°/s J6:160°/s |
J1:90°/s J2:90°/s J3:100°/s J4:150°/s J5:150°/s J6:150°/s |
| End-Effector Speed | 2m/s | 2m/s | 3m/s | 2m/s | 1.6m/s |
| Brake Type | 24/12VDC electromagnetic friction | ||||
| Performance | |||||
| Power Consumption (under normal operating conditions) |
150W | 300W | 500W | 500W | 960W |
| Rated Lifespan | 30000h | ||||
| Operating Temperature | -20~45℃ | ||||
| Operating Humidity | 25~85%(non-condensing) | ||||
| Protection Level | IP64 | ||||
| Mounting Method | Flexible | ||||
| Noise Level | ≤60dB | ||||
| Communication Protocols | EtherCAT / CANopen | ||||
| Power Supply | DC 48V | ||||
| Materials | Aluminum Alloy | ||||
| Base Dimensions | □89×89mm | □110×110mm | □148×148mm | □148×148mm | □174×174mm |
| Tool I/O Ports | 2 digital inputs, 2 digital outputs, 2 analog inputs | ||||
| Tool I/O Power Supply | 24V | ||||
| Tool I/O Current Output | 2A | ||||
| EtherCAT Output | 1 channel | ||||
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.
| Product Features | ||
| Model | TB6-PRO-R3 | TB6-PRO-R5 |
| Payload | 3kg | 5kg |
| Repeatability | ±0.05mm | ±0.05mm |
| Self-weight | 17kg | 25kg |
| Working Radius | 666mm | 938.1mm |
| Degrees of Freedom | 6 | 6 |
| Programming | Performed through the graphical user interface on an 8-inch touchscreen teach pendant |
|
| Collaborative Operation | According to ISO 10218-1:2011, collaborative operations are conducted with safety features such as "safely limited power and force," "hand-guiding teaching," and "safe monitored stop" in compliance | |
| Joint Parameters | ||
| Working Range | J1:±180° J2:±180° J3:±155° J4:±180° J5:±180° J6:±180° |
J1:±180° J2:±180° J3:±155° J4:±180° J5:±180° J6:±180° |
| Maximum Speed | J1:180°/s J2:180°/s J3:180°/s J4:300°/s J5:300°/s J6:300°/s |
J1:180°/s J2:180°/s J3:180°/s J4:300°/s J5:300°/s J6:300°/s |
| End-Effector Speed | 2m/s | 2m/s |
| Brake Type | 24/12VDC electromagnetic friction | |
| Force Sensor | Single-axis force sensor | Single-axis force sensor |
| Performance | ||
| Power Consumption (under normal operating conditions) |
150W | 300W |
| Rated Lifespan | 30000h | |
| Operating Temperature | -20~45℃ | |
| Operating Humidity | 25~85%(non-condensing) | |
| Protection Level | IP64 | |
| Mounting Method | Flexible | |
| Noise Level | ≤60dB | |
| Communication Protocols | EtherCAT / CANopen | |
| Power Supply | DC 48V | |
| Materials | Aluminum Alloy | |
| Base Dimensions | □92×92mm | □110×110mm |
| Tool I/O Ports | 2 digital inputs, 2 digital outputs, 2 analog inputs | |
| Tool I/O Power Supply | 24V | |
| Tool I/O Current Output | 2A | |
| EtherCAT Output | 1 channel | |
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.
| Control Box | ||
| Size | 487×236×460mm | |
| Weight | 10Kg | |
| Cable Length | 6m | |
| Power Supply | 100-240VAC,50 - 60Hz | |
| Protection Level | IP54 | |
| Main Controller | X86 Architecture, Linux Real-Time Operating System | |
| Extended Communication Protocol | TCP/IP,Modbus TCP/RTU(RS485) | |
| Control Box I/O Interface | ||
| General I/O | General I/O | |
| Digital Input | 16 | 16 |
| Digital Output | 16 | 16 |
| I/O Power Supply | 24V 5A | |
| Teaching Device | ||
| Size | 280×199.1×70.7mm | |
| Weight | 1.2kg | |
| Monitor | 8-inch Resistive Touchscreen LCD | |
| Cable Length | 6m | |
| Protection Level | IP54 | |
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.