
HJL Series Linear Actuator
New Products• Specifically engineered for humanoid robot applications, delivering flexible and powerful limb motion control
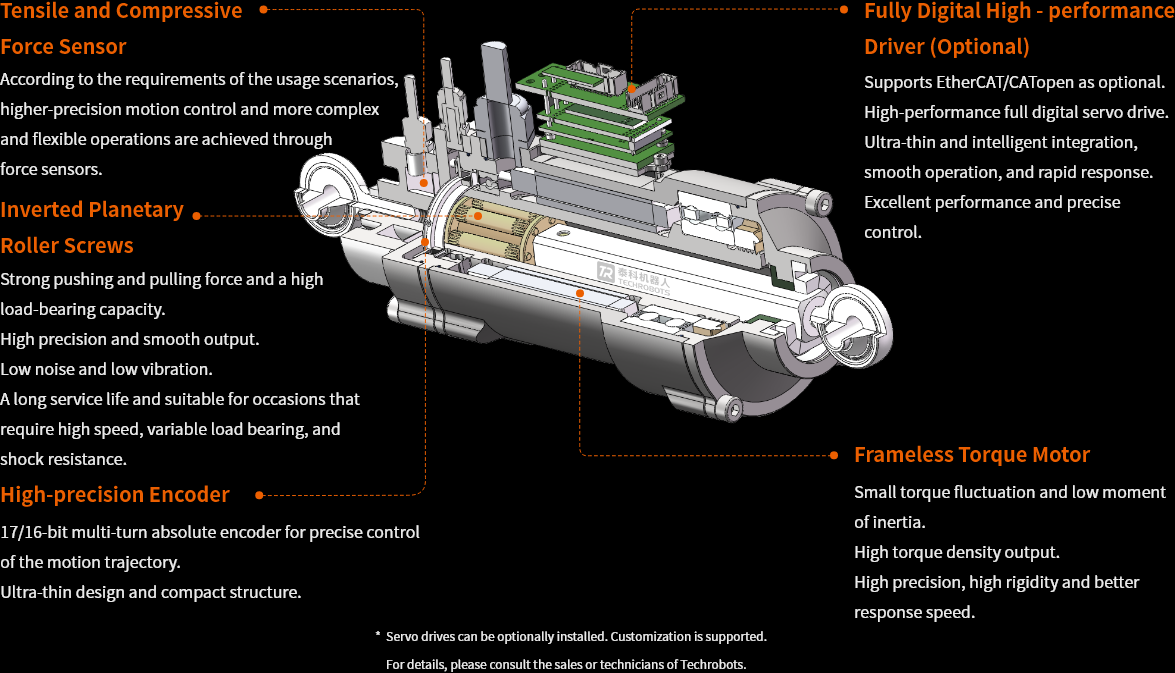
• Integrates a planetary roller screw, force sensor, motor, and encoder into one compact linear actuator
• Strong thrust, stable and reliable performance, with customizable options
• Ingeniously compact design, further reducing overall weight
• Available in multiple configurations, enabling quick, simple, and efficient humanoid robot assembly, significantly shortening development cycles
Application ScenariosSpecific Cases >
Widely applied to humanoid robots, bipedal robots, bionic robots with large loads, etc.
- 8000NMax Thrust
- 400mm/sMax Speed
- 96mmMax Stroke
- 0.5kgMin Self-weight

HJL08
Max Thrust: 600N
Max Speed: 300mm/s
Max Stroke: 38mm
Weight: 0.5kg
Force Sensor: Tensile and compressive force sensor

HJL12
Max Thrust: 4000N
Max Speed: 120mm/s, 300mm/s
Max Stroke: 72mm
Weight: 1.3kg
Force Sensor: Tensile and compressive force sensor

HJL15
Max Thrust: 8000N
Max Speed: 120mm/s, 400mm/s
Max Stroke: 96mm
Weight: 2.8kg
Force Sensor: Tensile and compressive force sensor
Humanoid Robot Dual Arms Assembled with HJL Series Actuators
New Craftsmanship with Unique Ingenuity
Solve the adaptability and stability of robots in more complex working environments
Technical Specifications
Specifications
Download
| Items | Unit | HJL08 | HJL12 | HJL15 |
| Mechanical Parameters | ||||
| Screw Type | -- | Inverted planetary roller screws | Inverted planetary roller screws | Inverted planetary roller screws |
| Lead | mm | 3.5 | 2 / 5 | 2 / 6.5 |
| Max Thrust | N | 600 | 4000 | 8000 |
| Max Speed | mm/s | 300 | 120 / 300 | 120 / 400 |
| Max Stroke | mm | 38 | 72 | 96 |
| Servo System | ||||
| Rated Voltage | VDC | 48 | 48 | 48 |
| Rated Current | A(rms) | 4 | 9.2 | 25.3 |
| Rated Rotational Speed | rpm | 5000 | 3500 | 3500 |
| Peak Torque | N·m | 0.9 | 4 | 11.5 |
| Absolute Encoder | Bit | 17/16-bit multi-turn | ||
| Communication Protocol | -- | EtherCAT / CANopen | ||
| Dimensions | ||||
| Max Diameter | mm | 49 | 62 | 86 |
| Max Length | mm | 139.9 | 226.9 | 286.6 |
| Weight | kg | 0.5 | 1.3 | 2.8 |
| Other Specification | ||||
| Sensor Type | Tensile and compressive force sensor | |||
| IP Degree | IP40 | |||
| Operating Environment | Operating Temperature: 0~40°C, Storage Temperature: -40~ 80°C, Ambient Humidity: 90% Relative Humidity (Non-condensing) |
|||
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.
HJL Series Linear Actuator Model Description
| HJL | 12.5.72 | KN4300 | MA1716 | D7 | E | -RevB1 | |||
| Series | Screw Parameter | Module Parameter | Absolute Value Encode | Drive Model | Default Communication Config | Version Number | |||
| Model | Screw Lead | Route | Maximum Thrust | Maximum Speed | |||||
| linear planetary roller screw actuators | 8 | 3.5 | 38 | 600N | 300 | S: Single Turn/M: Multi-Turn A: Absolute Value 17/16: Encoder Single-Turn Resolution |
D7: TGM
D8: TGB
D11: DGT
D12: DGB
|
E: EtherCAT C: CANopen R: 485 communication |
B1: Design Version Number |
| 12 | 2 | 72 | 4000N | 120 | |||||
| 5 | 72 | 4000N | 300 | ||||||
| 15 | 2 | 96 | 8000N | 120 | |||||
| 6.5 | 96 | 8000N | 400 | ||||||
ExampleModel:
Rapidly Assemble Humanoid Robots
Assisting in saving time and labor costs during the processes of robot design, accessory selection, performance testing, etc.

