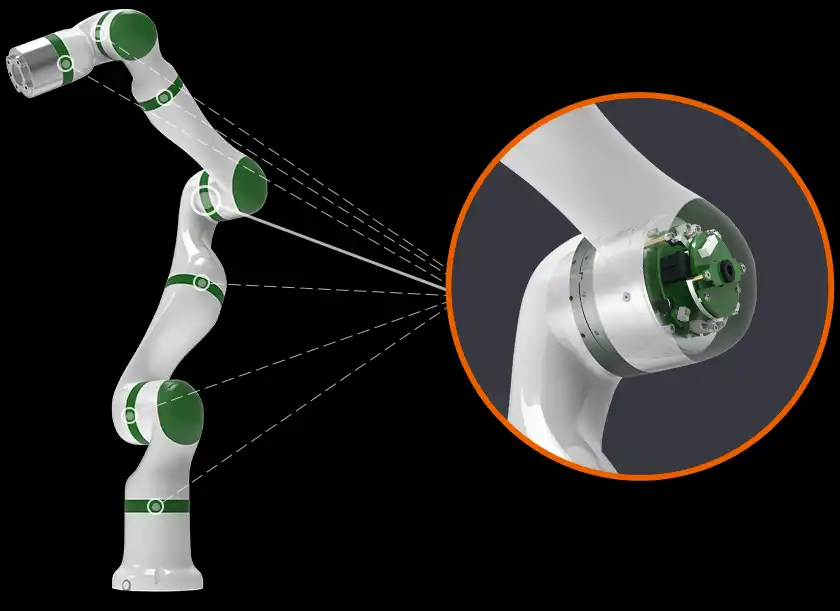
MJX Series Actuator
Bestseller• Techrobots 3rd generation cobot actuator, provide customized services for products and solutions.
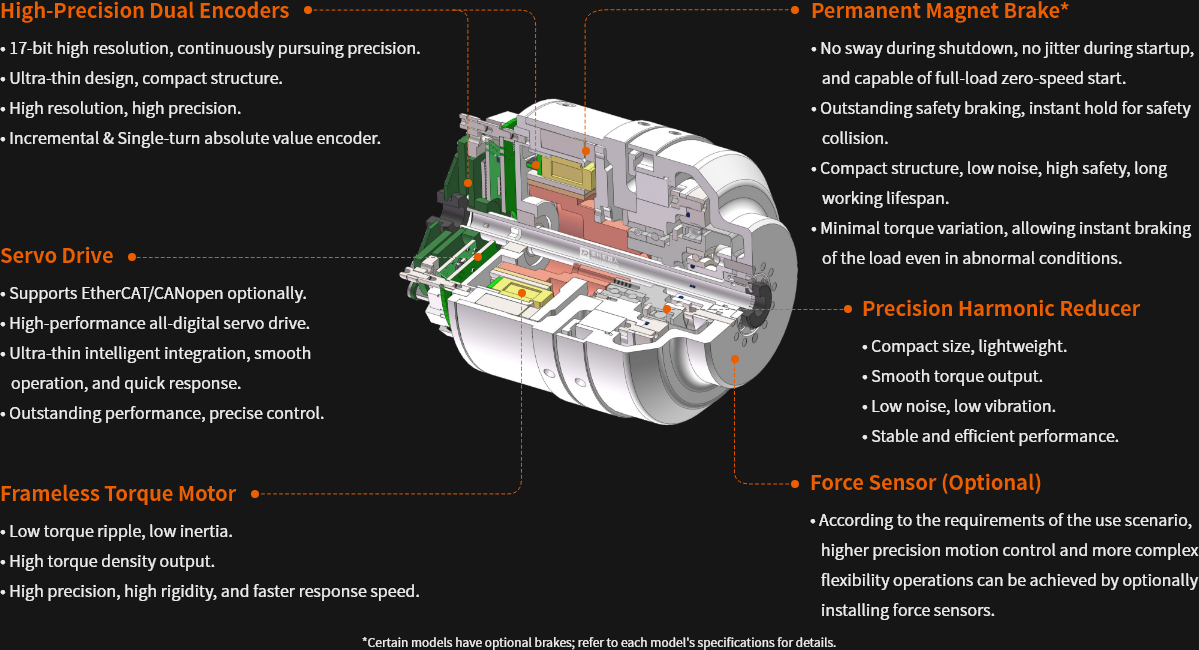
• Integrated harmonic reducer, drive, motor, dual encoders and brake (Optional).
• High positioning accuracy, significantly improved reliability and stability.
• Rapid assembly of robots, significantly shortening the development cycle.
• Sophisticated structural design, lighter, smaller, and more compact.
• Customers can independently design the shell, customizing a unique robot.
Application ScenariosSpecific Cases >
Cobot, Humanoid Robots, Life Service Robots, Medical Robots, Precision Rotary Tables, etc
- 0.63kgSelf-Weight
- 69mmMinimum Diameter
- 48N·mMaximum Average Load Torque
- 45rpmMaximum Speed
- <60arcsecRepeatability

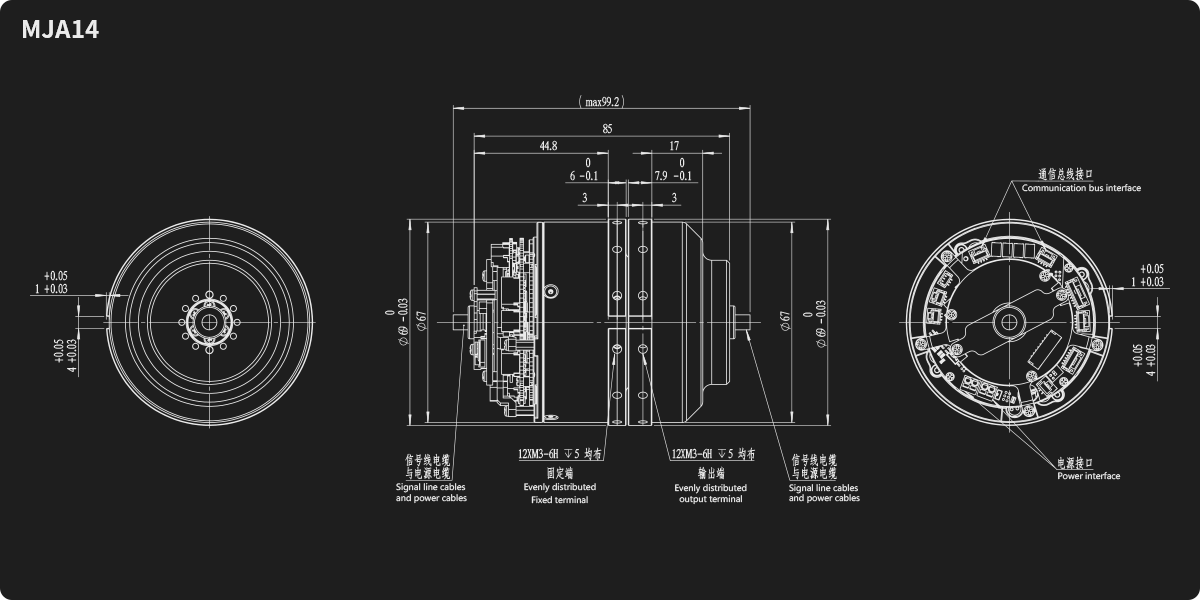
MJA14
Diameter:69mm
Weight:<0.63kg
Average load torque:7N·m
Rated speed:32rpm
Brake:None

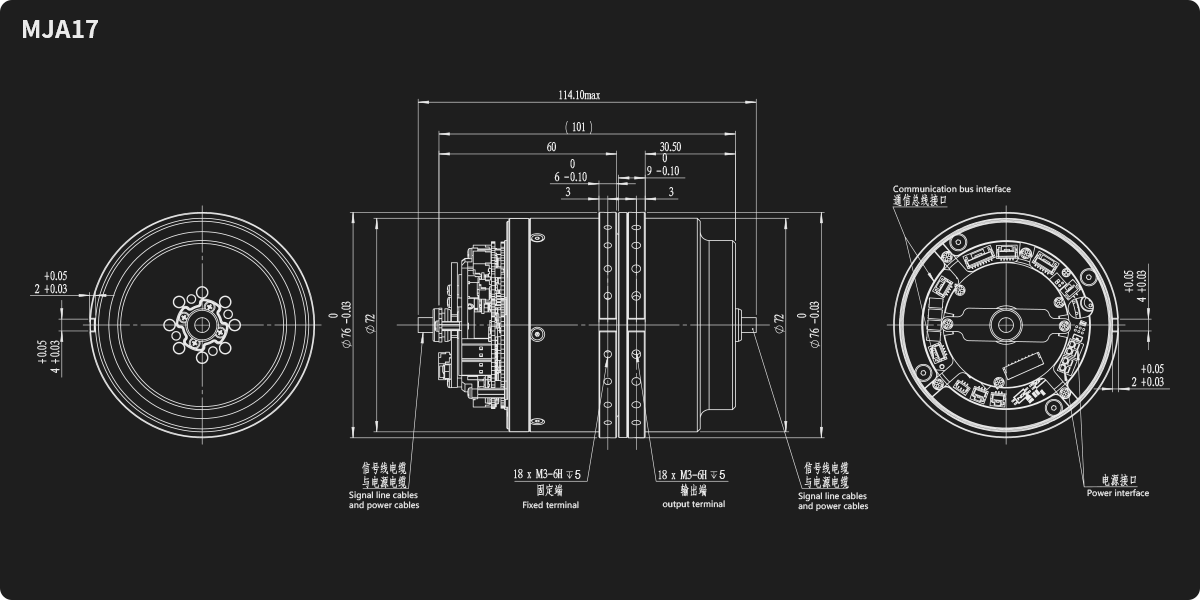
MJA17
Diameter: 76mm
Weight: <0.95kg
Average load torque: 40N·m
Rated speed: 30rpm
Brake: None

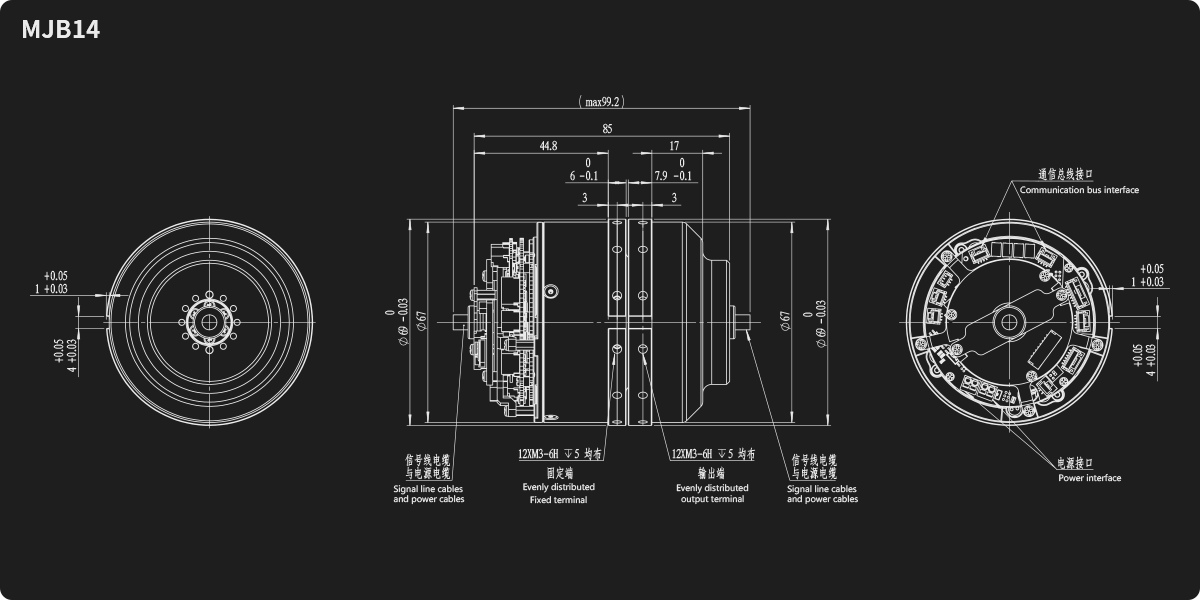
MJB14
Diameter: 69mm
Weight: <0.73kg
Average load torque: 7N·m
Rated speed: 32rpm
Brake: 24VDC Permanent Magnetic Brake

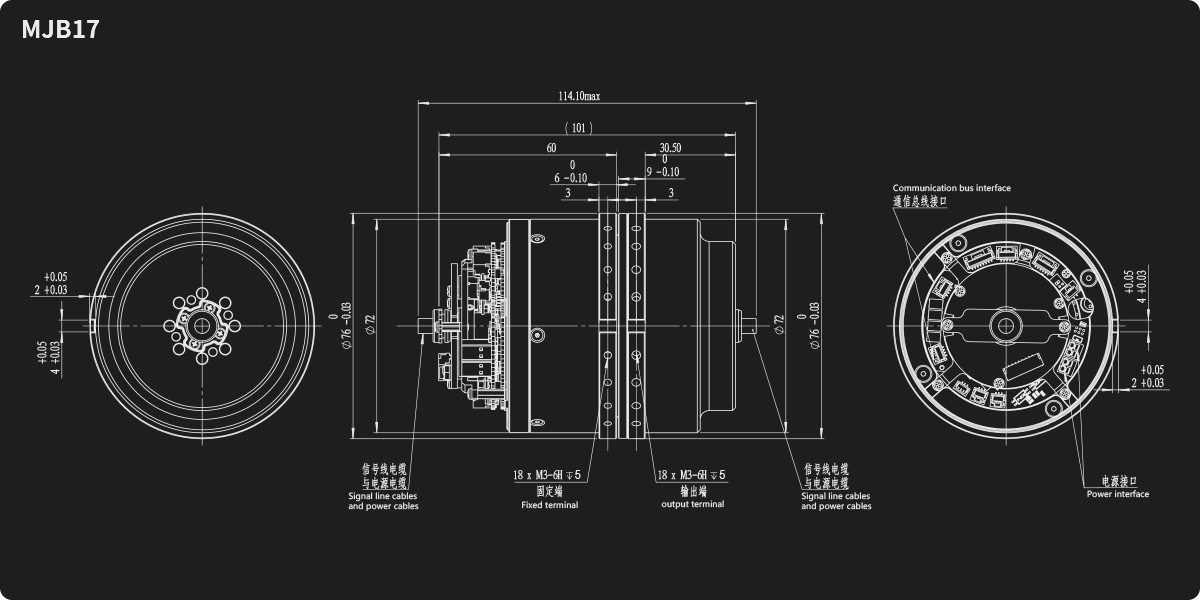
MJB17
Diameter: 76mm
Weight: <1.1kg
Average load torque: 40N·m
Rated speed: 30rpm
Brake: 24VDC Permanent Magnetic Brake
A brand-new process, crafted with ingenuity
Addressing the adaptability and stability of robots in more complex working environments
Technical Specifications
Specifications
Drawings
| Category | Unit | MJA14 | MJA17 | MJB14 | MJB17 |
| Parameters of Harmonic Drive Reducer | |||||
| Reduction Ratio | -- | 100 | 100/120 | 100 | 100/120 |
| Gearbox Backlash | arcsec | ≤20 | ≤20 | ≤20 | ≤20 |
| Transmission Accuracy | arcmin | <1 | <1 | <1 | <1 |
| Average Lifespan | Hour | 20000 | 20000 | 20000 | 20000 |
| Output Capability | |||||
| Permissible Starting and Stopping Torque | N·m | 18 | 56 | 18 | 56 |
| Average Load Torque | N·m | 7 | 40/48 | 7 | 40/48 |
| Maximum Instantaneous Torque | N·m | 25 | 80 | 25 | 80 |
| Maximum Allowable Bending Torque | N·m | 15 | 35 | 15 | 35 |
| Rated Speed | rpm | 32 | 30/25 | 32 | 30/25 |
| Maximum Speed | rpm | 45 | 35/29 | 45 | 35/29 |
| Repeatability | arcsec | <60 | <60 | <60 | <60 |
| Absolute Positioning Accuracy | arcsec | <300 | <300 | <300 | <300 |
| Servo System | |||||
| Motor Power | W | 135 | 175 | 135 | 175 |
| Rated Voltage | VDC | 48 | 48 | 48 | 48 |
| Rated Current | A(rms) | 3.5 | 5 | 3.5 | 5 |
| Peak Current | A(rms) | 8.4 | 12 | 8.4 | 12 |
| Incremental Encoder | P/R | 8000 | 8000 | 8000 | 8000 |
| Absolute Encoder | Bit | 17 | 17 | 17 | 17 |
| Communication Protocol | -- | EtherCAT / CANopen | |||
| Dimensions | |||||
| Diameter | mm | 69 | 76 | 69 | 76 |
| Length | mm | 86 | 101 | 86 | 101 |
| Through Hole Diameter | mm | 5 | 7 | 5 | 7 |
| Weight | kg | 0.63 | 0.95 | 0.73 | 1.1 |
| Other Specification | |||||
| Brake | Without Brake | 24VDC Permanent Magnet Brake | |||
| IP Degree | IP40 | ||||
| Operating Environment | Operating Temperature: 0~40°C (Optional: -40 to 60°C), Storage Temperature: -40 to 80°C, Ambient Humidity: 90% Relative Humidity (Non-condensing) |
||||
Note: We offer OEM/ODM customization services. If you have any additional technical requirements, please contact us for further consultation.
MJX Series Actuator Model Description
| MJ | A | 14 | -100 | -4E | -SA17 | -D6 | E | -A1 |
| Series | Brake | Model | Gear Ratio | Motor Voltage & Incremental Encoder | Absolute Value Encode | Drive Model | Default Communication Config. | Version Number |
| MJ | A:nil | 14 | 100 |
2: 24V
4: 48V
|
S:Single Turn M:Multi-Turn A:Absolute Value 17:Encoder Single-Turn Resolution |
D5: MJA14-RGT
D6: RGT
D9: MJB20-25
D10: MJA14-RDM
|
E: EtherCAT
C: CANopen
R: 485
|
A1:Design Version Number |
| 17 | 50/100/120 | |||||||
| B:Permanent Magnet Brake | 14 | 100 | ||||||
| 17 | 50/100/120 |
ExampleModel:
Assemble the robot quickly
Assisting in streamlining robot design, accessory selection, and performance testing to save time and manpower costs