5kg Linear Actuator Humanoid Robot Arm
2025-11-11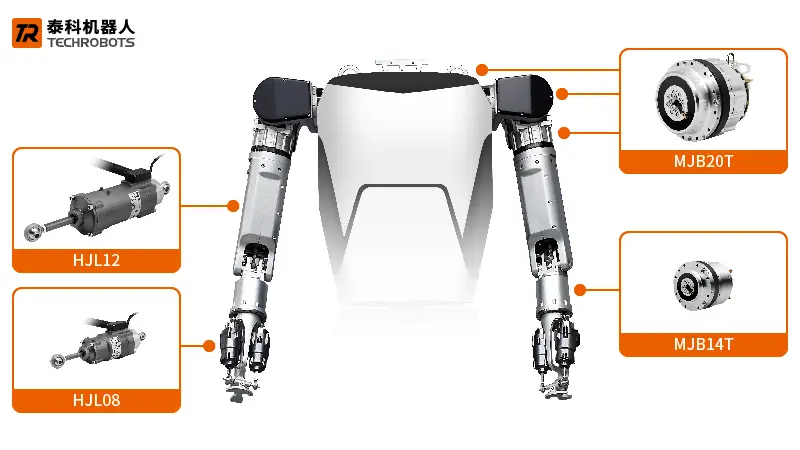
1. Hybrid Actuator Configuration Design
The single arm employs a hybrid configuration combining HJL linear actuators and MJBX force-controlled rotary actuators .
The joint modules for the 7 axes are:
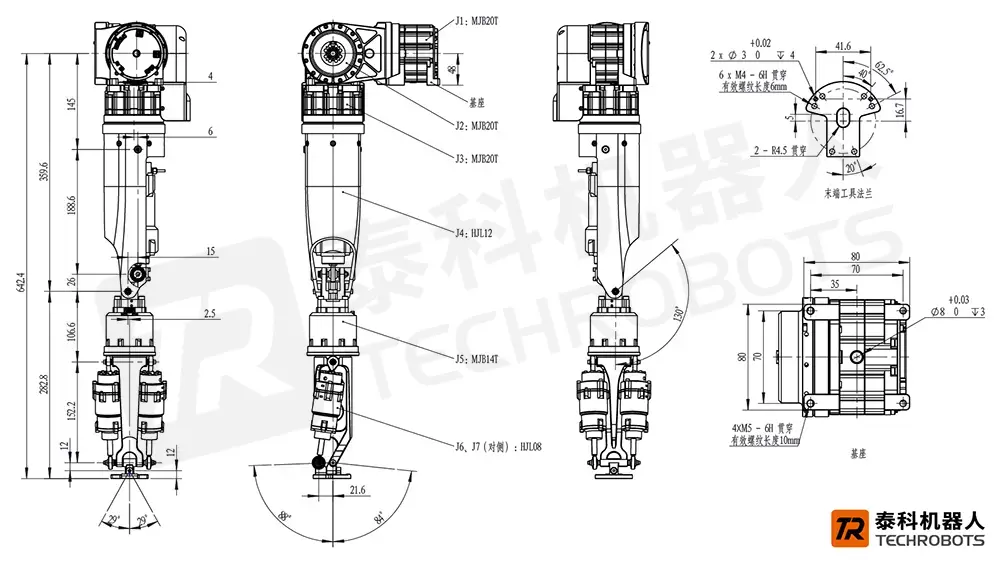
- Axes 1–3: MJB20T
- Axis 4: HJL12
- Axis 5: MJB14T
- Axes 6–7: HJL08
2. Core Specifications
- Single arm weight: 10 kg
- Payload capacity: ≥5 kg per arm
- Arm reach: 642.4 mm
3. Flexible Configuration
Each actuator includes a single-axis force sensor, with optional six-axis force sensor and dexterous hand at the end-effector.
4. Servo Drive System
Supports real-time communication via EtherCAT and CANopen protocols.
"This 5kg payload humanoid robot arm demonstrates Techrobots' hybrid actuator approach: combining HJL linear actuators for shoulder and elbow motions with MJB force-controlled rotary joints for wrist articulation, enabling high-payload precision manipulation at low arm weight (10kg total)." "The arm supports optional 6-axis force sensor and dexterous hand integration, making it suitable for assembly, logistics, and advanced humanoid robot embodied AI applications."
Previous Article: None
Next Article: 3kg Lightweight Humanoid Robot Arm