5kg High-Payload Full Force-Controlled Humanoid Robot Arm
2025-11-11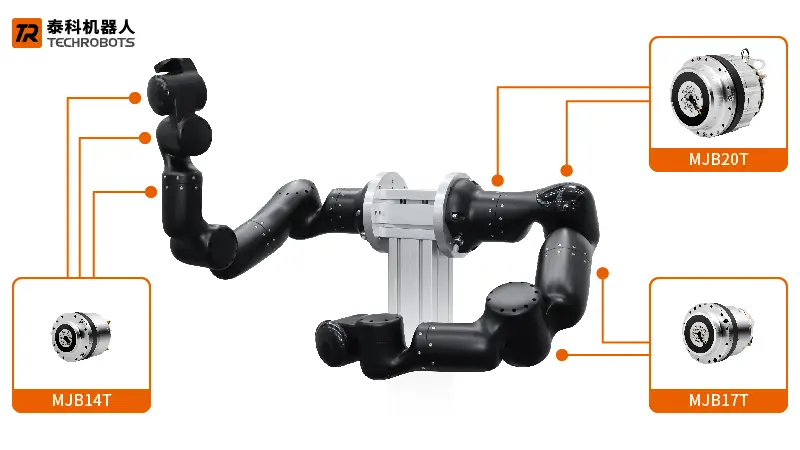
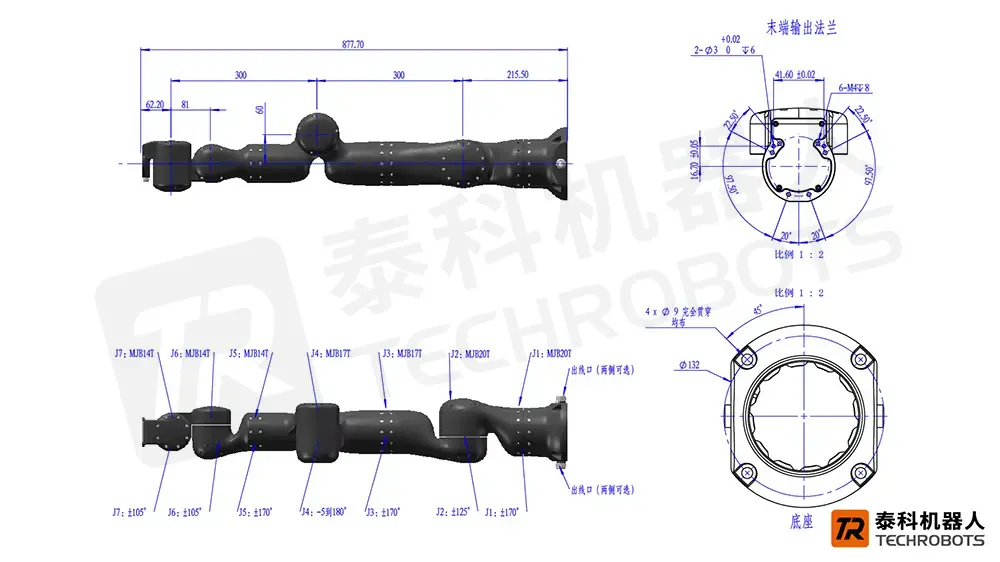
1. Full Force-Controlled Rotary Joint Configuration
Each arm is composed of MJBX Series force-controlled rotary actuators.
The seven joints are configured as follows:
-
Axes 1–2: MJB20T
-
Axes 3–4: MJB17T
-
Axes 5–7: MJB14T
2. Core Specifications
The single arm weighs 12 kg, supports an effective payload ≥ 5 kg, and offers a reach of 600 mm.
All actuators are equipped with permanent-magnet brakes, and the minimum hollow shaft diameter is 7 mm.
3. Flexible Configuration
Each actuator can be optionally equipped with a single-axis force sensor, while the end effector supports integration with a six-axis force/torque sensor or a dexterous robotic hand.
4. Servo Drive System
Supports real-time EtherCAT and CANopen communication protocols for high-speed, deterministic control.
5. Intelligent Control System
Compatible with an Embodied Intelligence Cerebellum Control System, featuring core motion control algorithms and domain-specific AI models.
Supports complex motion planning, secondary development interfaces, and millisecond-level command response.
"The 5kg full force-controlled humanoid robot arm integrates 7 MJBX series joints, each with built-in torque sensors, enabling closed-loop force feedback at every degree of freedom — a key requirement for safe human-robot contact and precision assembly tasks." "This solution is ideal for OEM developers building next-generation humanoid robots that need compliant manipulation, safe physical interaction, and embodied AI integration without sacrificing payload capacity."
Previous Article: 3kg Lightweight Humanoid Robot Arm
Next Article: Magnetic Capsule Robot for Customized Medical Diagnostics