3KG轻量化人形机器人手臂
2025-11-11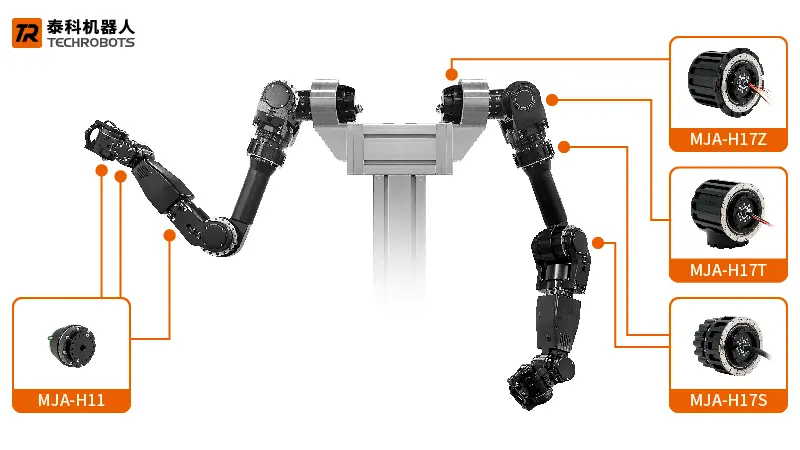
1、全旋转关节构型
单臂采用MJA-H系列轻量化旋转关节组成,更轻、更小、更紧凑。
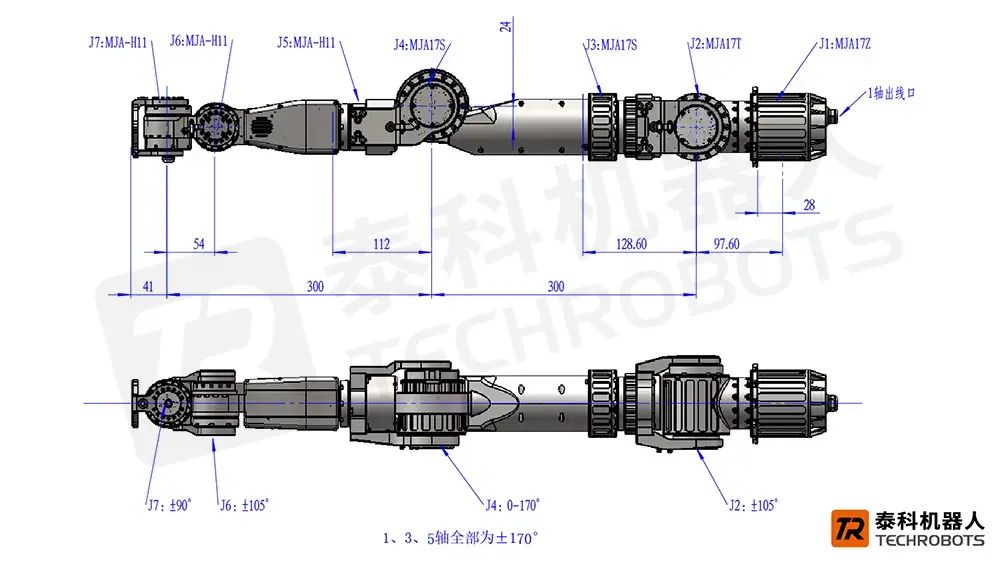
其中构成7个轴的模组型号分别为:1轴:MJA-H17Z,2轴:MJA-H17T,3~4轴:MJA-H17S,5~7轴:MJA-H11。
2、基础参数
单臂自重5.6kg,单臂有效负载≤3kg,单臂臂展600mm,中间过线通孔最大尺寸:5mm。
3、伺服驱动系统
支持EtherCAT/CANopen实时通信。
4、智能控制系统
可搭载南京贞实科技研发的具身智能小脑控制系统,提供核心运动控制算法与垂类AI模型,支持复杂运动规划及底层二次开发接口,支持毫秒级指令接收。
上一篇: 5KG直线关节人形机器人手臂
下一篇: 5KG大负载全力控人形机器人手臂