
MJX系列关节模组
热销精品• 泰科第三代关节模组,提供产品和解决方案定制化服务
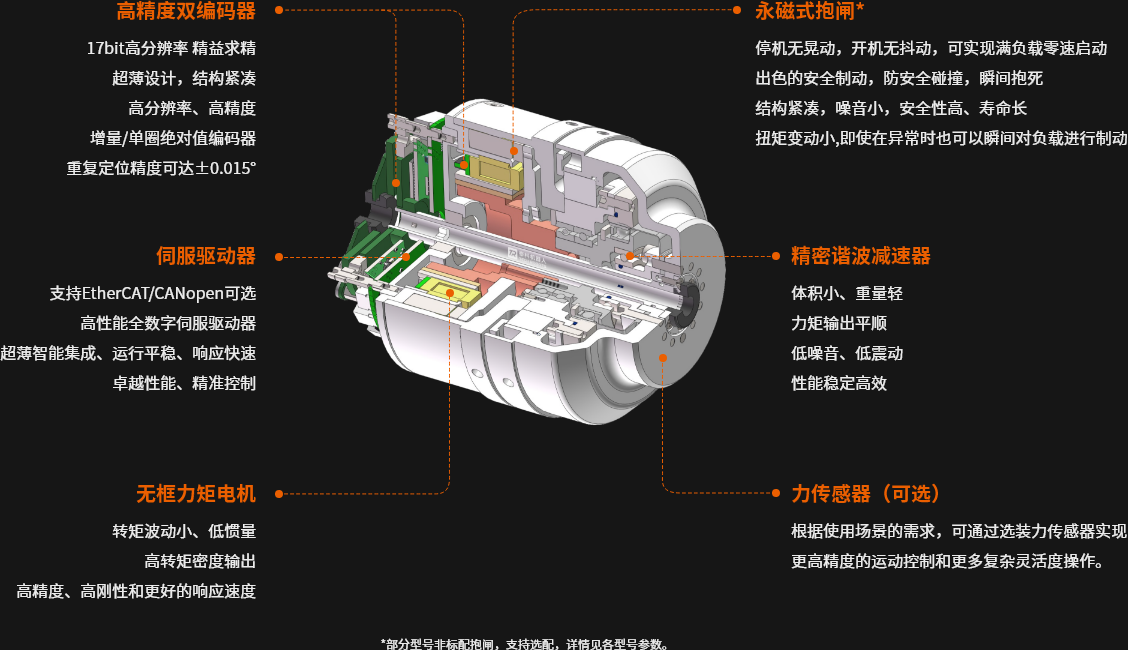
• 集谐波减速器、驱动器、电机、双编码器、抱闸 (可选) 于一体
• 定位精度高,可靠性稳定性大幅提升
• 快速组装机器人,大幅缩短开发周期
• 精巧结构设计,更轻、更小、更紧凑
• 客户可自主设计外壳,定制专属机器人
推荐应用场景具体案例 >
协作机器人、人形机器人、 生活服务机器人、 医疗机器人、 精密转台等
- 0.63kg自重轻至
- 69mm最小直径
- 48N·m最大平均负载转矩
- 45rpm最大转速
- <60arcsec重复定位精度

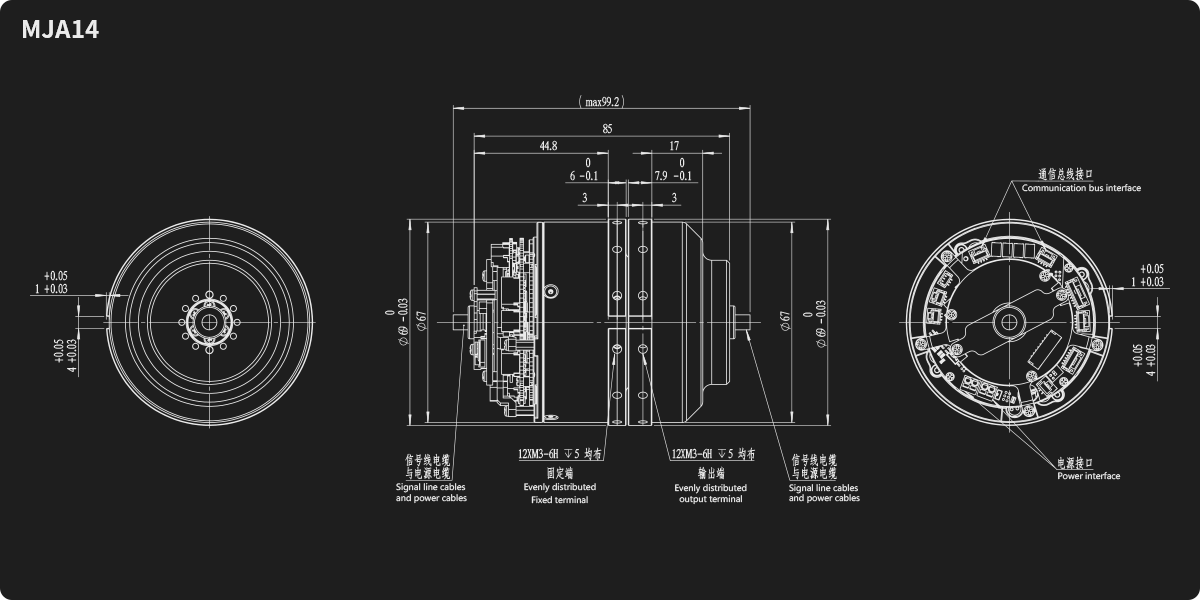
MJA14
直径:69mm
重量:<0.63kg
平均负载转矩:7N·m
额定转速:32rpm
抱闸:无

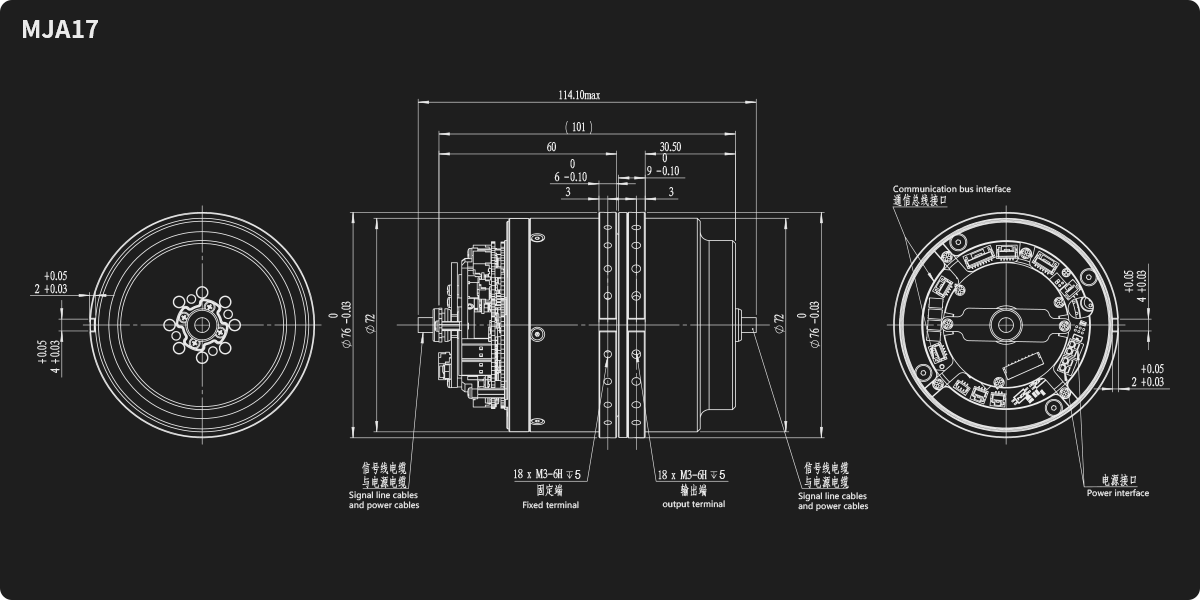
MJA17
直径:76mm
重量:<0.95kg
平均负载转矩:40N·m
额定转速:30rpm
抱闸:无

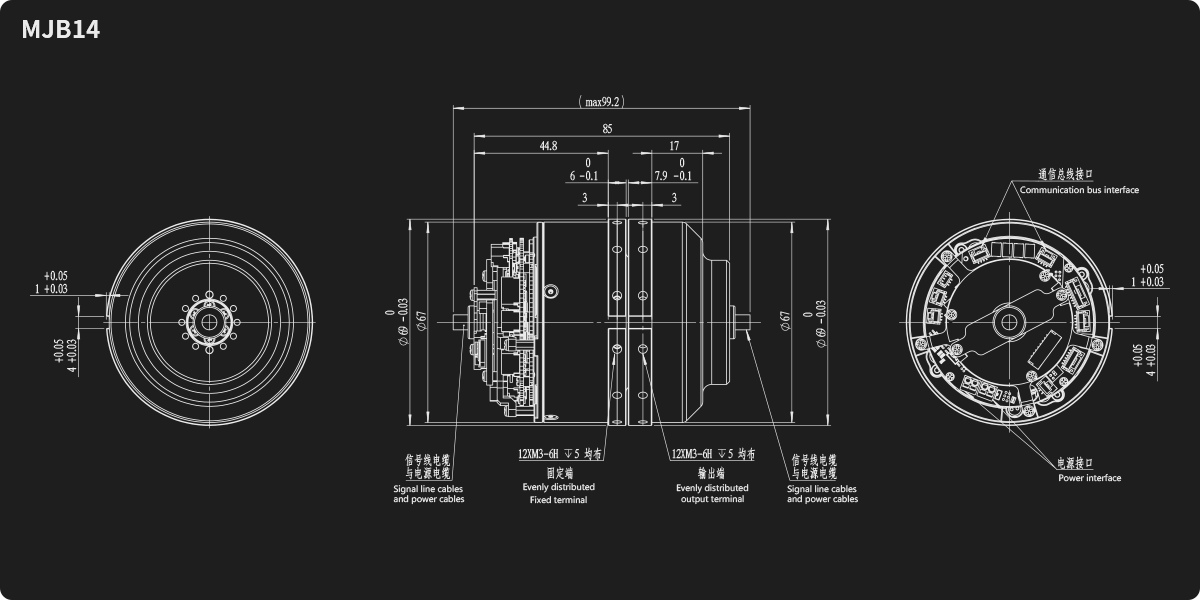
MJB14
直径:69mm
重量:<0.73kg
平均负载转矩:7N·m
额定转速:32rpm
抱闸:24VDC永磁式抱闸

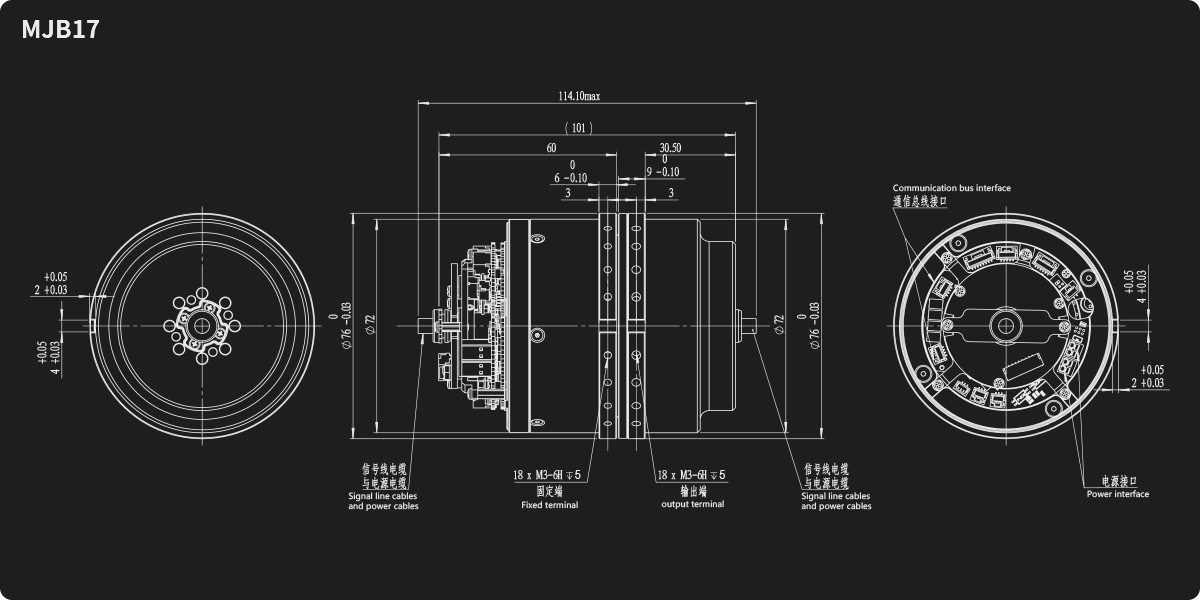
MJB17
直径:76mm
重量:<1.1kg
平均负载转矩:40N·m
额定转速:30rpm
抱闸:24VDC永磁式抱闸
全新工艺,匠心独具
解决机器人在更多复杂工作环境的适应性和稳定性
技术参数
| 项目 | 单位 | MJA14 | MJA17 | MJB14 | MJB17 |
| 谐波减速器参数 | |||||
| 减速比 | -- | 100 | 100/120 | 100 | 100/120 |
| 减速器背隙 | arcsec | ≤20 | ≤20 | ≤20 | ≤20 |
| 传动精度 | arcmin | <1 | <1 | <1 | <1 |
| 平均寿命 | Hour | 20000 | 20000 | 20000 | 20000 |
| 输出能力 | |||||
| 启停容许转矩 | N·m | 18 | 56 | 18 | 56 |
| 平均负载转矩 | N·m | 7 | 40/48 | 7 | 40/48 |
| 最大瞬时转矩 | N·m | 25 | 80 | 25 | 80 |
| 最大许用弯矩 | N·m | 15 | 35 | 15 | 35 |
| 额定转速 | rpm | 32 | 30/25 | 32 | 30/25 |
| 最大转速 | rpm | 45 | 35/29 | 45 | 35/29 |
| 重复定位精度 | arcsec | <60 | <60 | <60 | <60 |
| 绝对定位精度 | arcsec | <300 | <300 | <300 | <300 |
| 伺服系统 | |||||
| 电机功率 | W | 135 | 175 | 135 | 175 |
| 额定电压 | VDC | 48 | 48 | 48 | 48 |
| 额定电流 | A(rms) | 3.5 | 5 | 3.5 | 5 |
| 峰值电流 | A(rms) | 8.4 | 12 | 8.4 | 12 |
| 增量编码器 | P/R | 8000 | 8000 | 8000 | 8000 |
| 绝对值编码器 | Bit | 17 | 17 | 17 | 17 |
| 通讯协议 | -- | EtherCAT / CANopen | |||
| 外形尺寸 | |||||
| 关节直径 | mm | 69 | 76 | 69 | 76 |
| 关节长度 | mm | 86 | 101 | 86 | 101 |
| 通孔直径 | mm | 5 | 7 | 5 | 7 |
| 关节重量 | kg | 0.63 | 0.95 | 0.73 | 1.1 |
| 其他 | |||||
| 抱闸 | 无抱闸 | 24VDC永磁式抱闸 | |||
| IP等级 | IP40 | ||||
| 工作环境 | 运行温度:0~40°C(-40~60°C可选),存贮温度:-40~80°C,环境湿度: 90%相对湿度(无冷凝) | ||||
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。
MJX系列关节模组型号说明
| MJ | A | 14 | -100 | -4E | -MA1716 | -D6 | E | -A1 |
| 系列 | 抱闸 | 型号 | 减速比 | 电机电压+增量编码器 | 绝对值编码器 | 驱动器型号 | 默认通讯配置 | 版本号 |
| MJ | A:无 | 14 | 100 |
2: 24V
4: 48V
E: 带增量编码器
空: 无增量编码器
|
S单圈M多圈 A-绝对值 17编码器单圈位数 16编码器多圈位数 |
D5: MJA14-RGT
D6: RGT
D9: MJB20-25
D10: MJA14-RDM
|
E: EtherCAT
C: CANopen
R: 485
|
A1:设计版本号 |
| 17 | 50/100/120 | |||||||
| B:永磁制动器 | 14 | 100 | ||||||
| 17 | 50/100/120 |
示例型号:

