
RJSII系列关节模组
热销精品• 泰科第二代关节模组,多种规格,快速组装您需要的机器人
• 经典款式,性能强劲,可靠性高
• 全新设计结构,散热性能好
• 工作温度区间-20℃~50℃,适用恶劣气候条件
• 输出强劲,最大转矩从50~1500N•m可选
• 防护等级IP54(IP65可选),适用苛刻工作环境
• 提供产品和解决方案定制化服务
推荐应用场景具体案例 >
协作机器人、医疗机器人、精密转台、自动化设备等
- 1.04kg自重轻至
- 66mm最小直径
- 557N·m最大平均负载转矩
- <60arcsec重复定位精度
- 8000+出货量

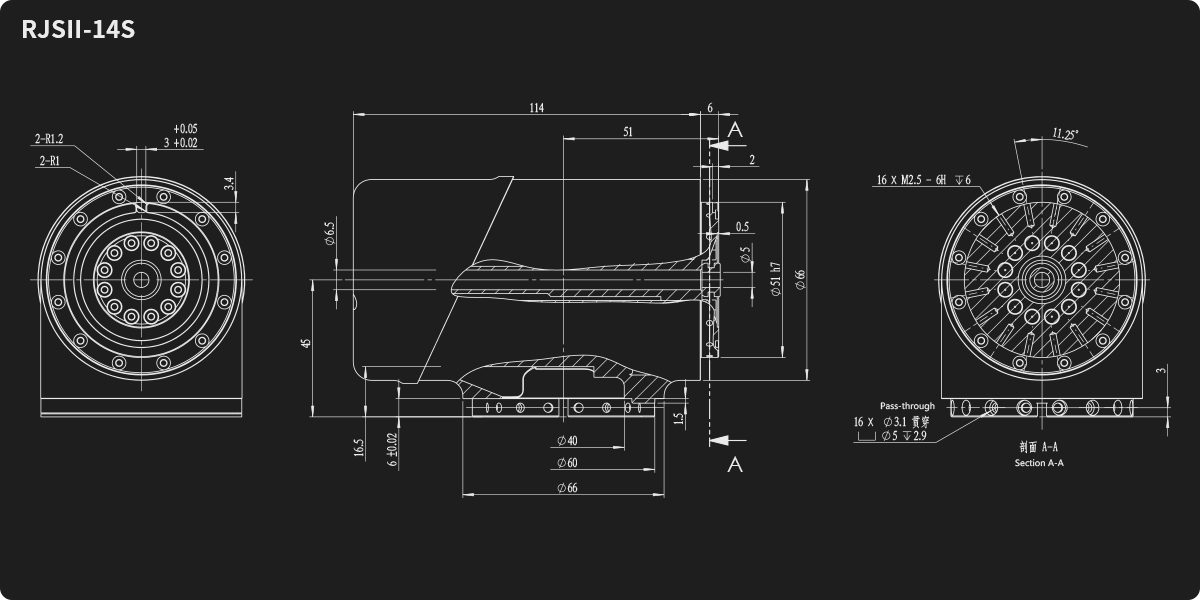
RJSII-14S
直径: 66mm
重量: 1.04kg
平均负载转矩: 10.5N·m
额定转速: 30rpm
抱闸: 24/12VDC电磁摩擦式

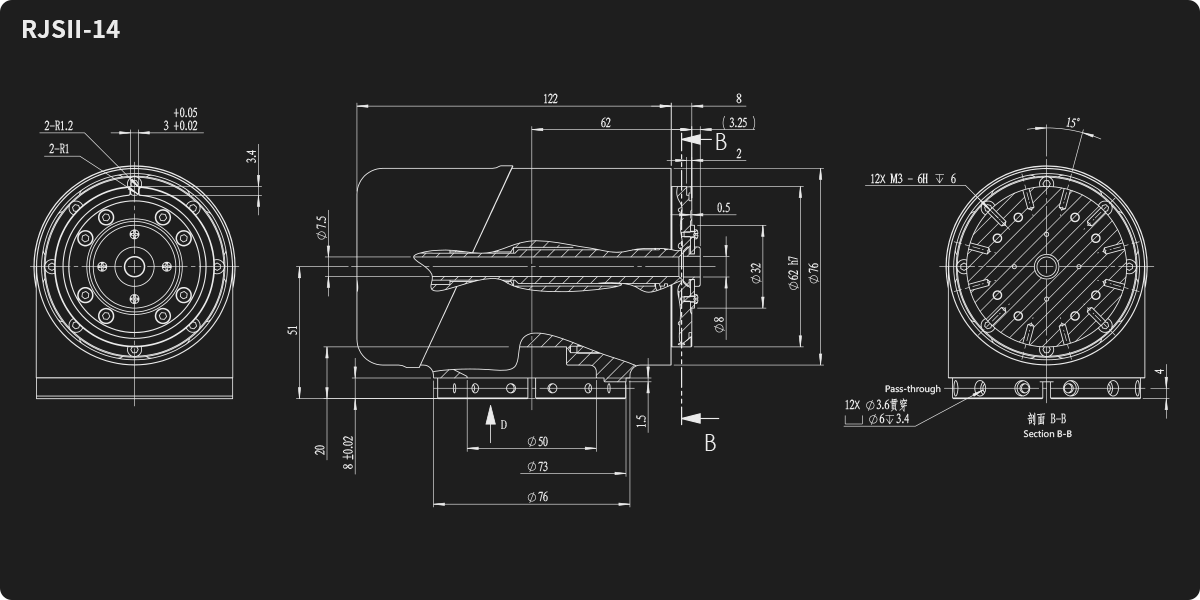
RJSII-14
直径: 76mm
重量: 1.6kg
平均负载转矩: 13.5N·m
额定转速: 30rpm
抱闸: 24/12VDC电磁摩擦式

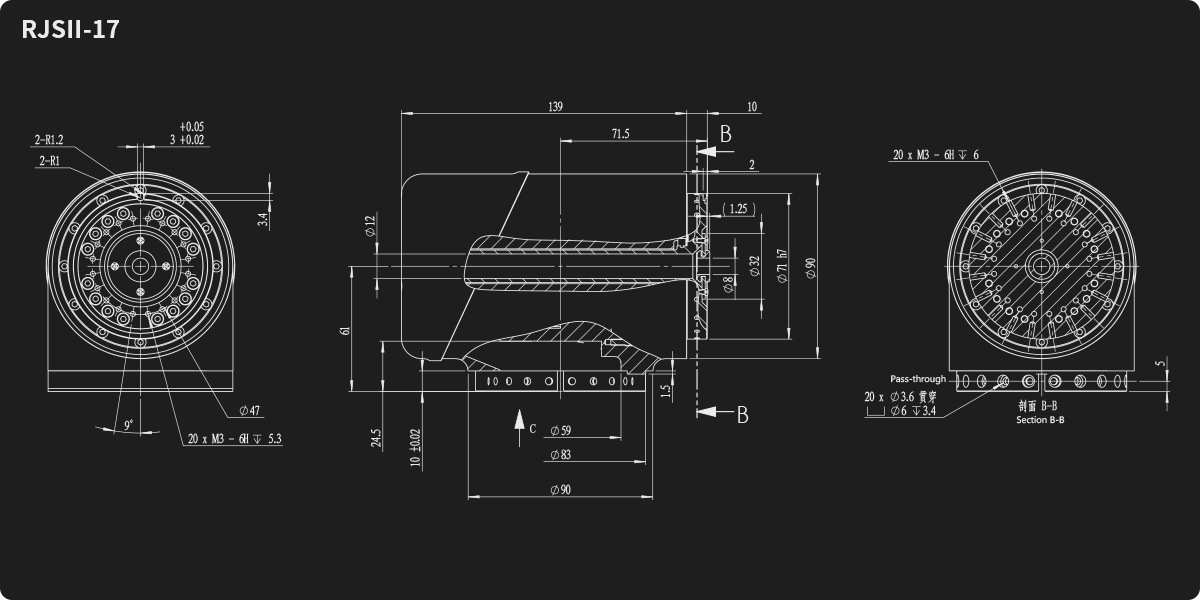
RJSII-17
直径: 90mm
重量: 2.6kg
平均负载转矩: 49N·m
额定转速: 19.8rpm
抱闸: 24/12VDC电磁摩擦式

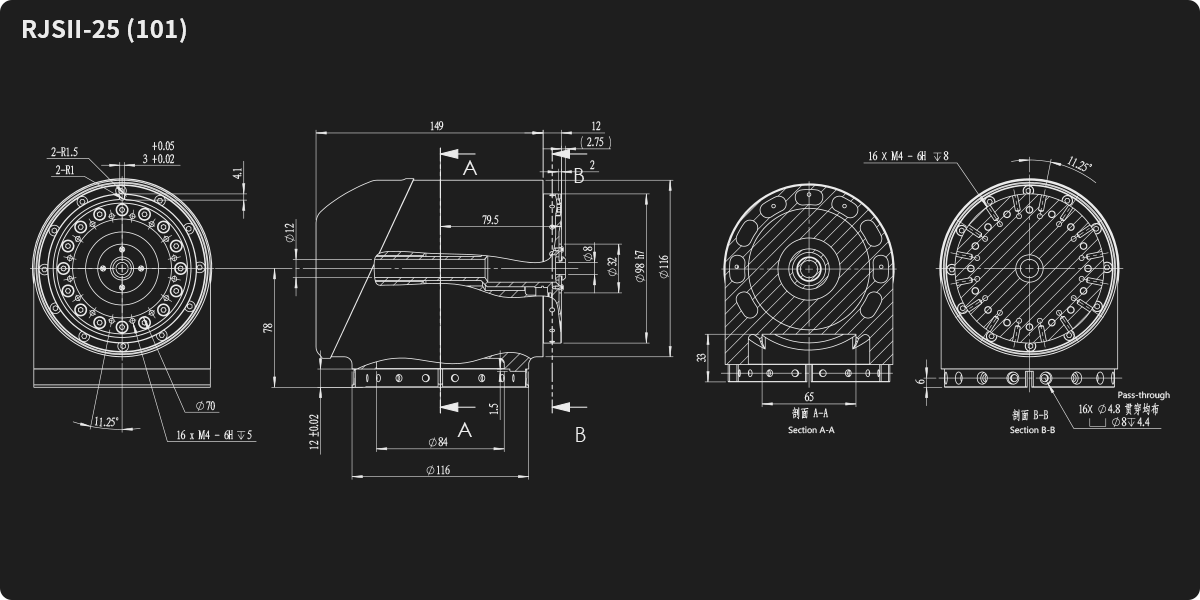
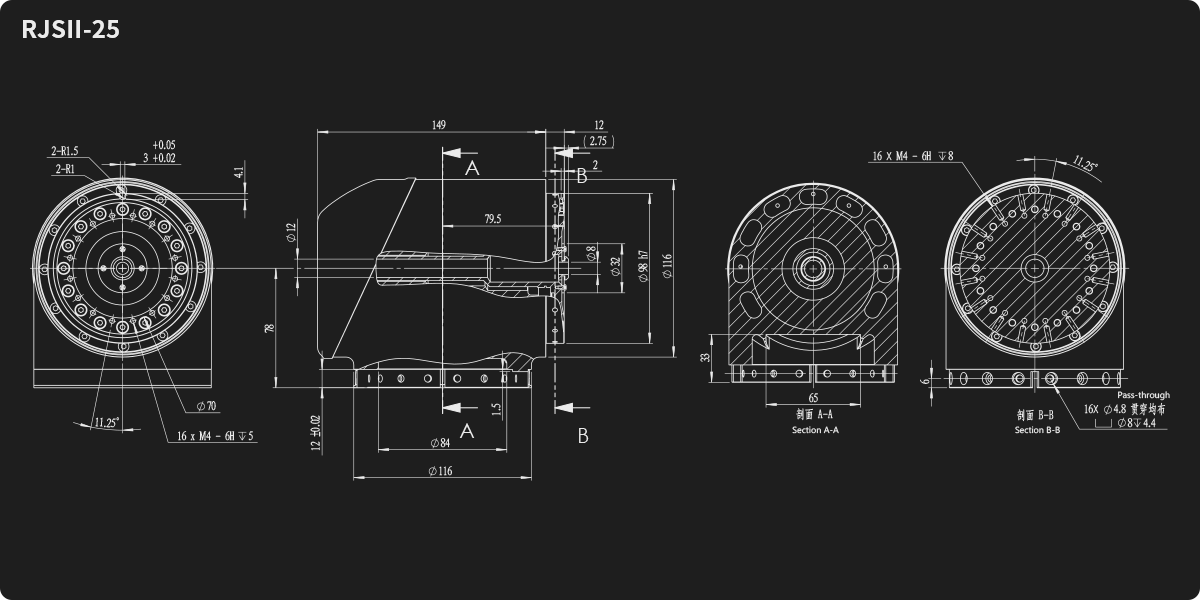
RJSII-25
直径: 116mm
重量: 4.5kg
平均负载转矩: 133N·m
额定转速: 29.7/24.8rpm
抱闸: 24/12VDC电磁摩擦式
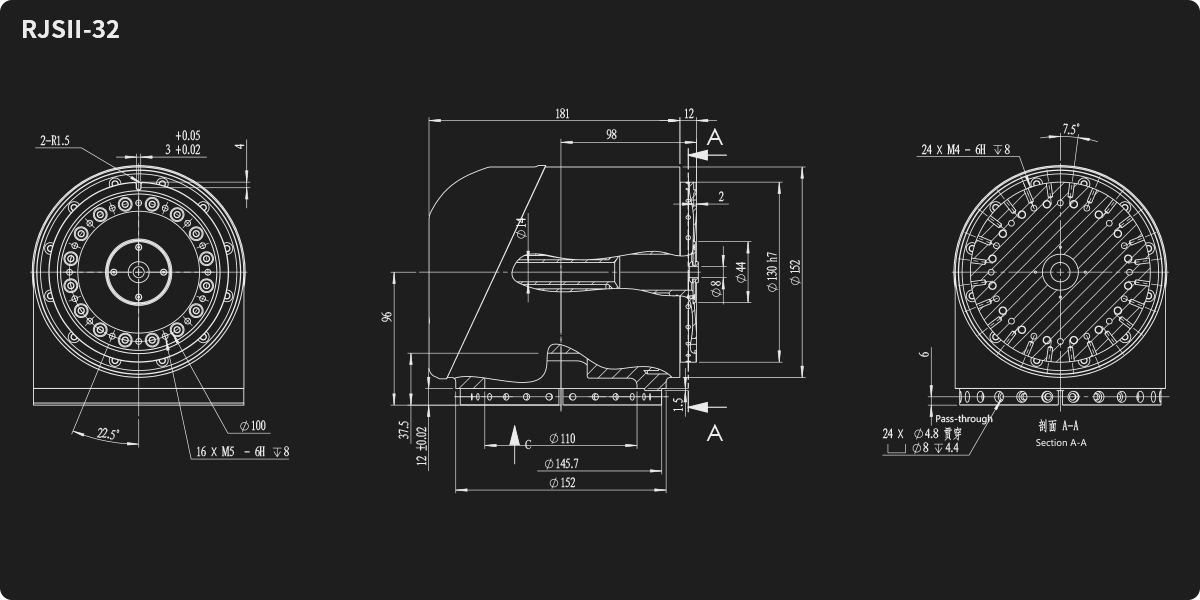
RJSII-32
直径: 152mm
重量: 8.6kg
平均负载转矩: 267N·m
额定转速: 12.4rpm
抱闸: 24/12VDC电磁摩擦式
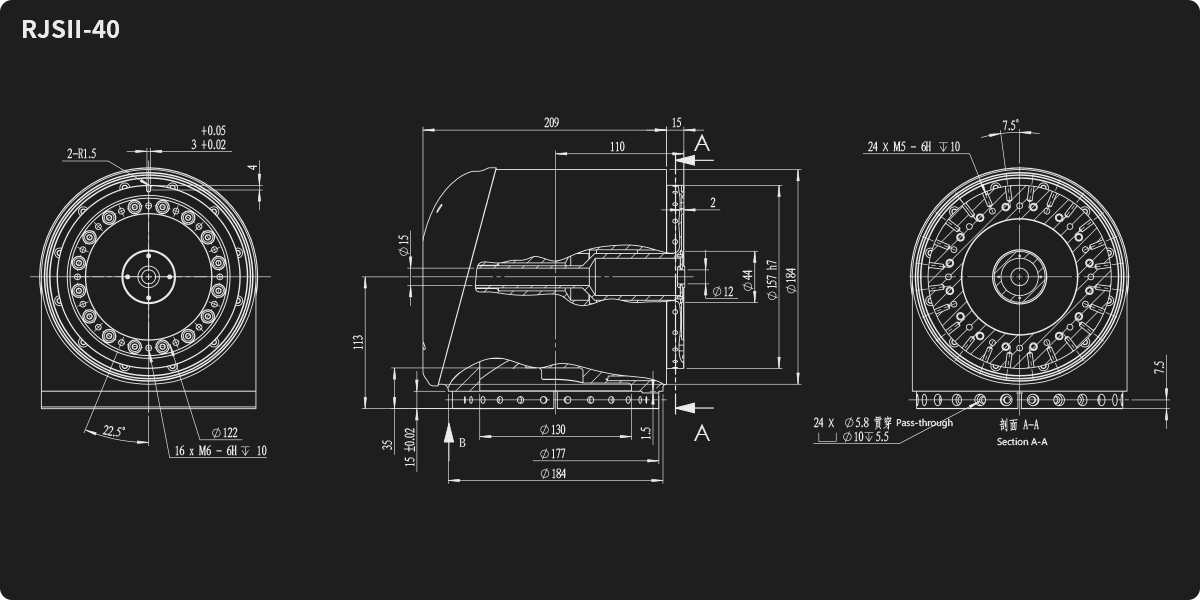
RJSII-40
直径: 184mm
重量: 15kg
平均负载转矩: 557N·m
额定转速: 16.5rpm
抱闸: 24/12VDC电磁摩擦式
全新升级,精品工艺,性价比高
性能全面提升,定位精度更高,输出力矩更大,运行顺畅更安全
技术参数
| 项目 | 单位 | RJSII-14S | RJSII-14 | RJSII-17 | RJSII-20 | RJSII-25 | RJSII-32 | RJSII-40 |
| 谐波减速器参数 | ||||||||
| 减速比 | -- | 100 | 101 | 101 | 101 | 101/121 | 121 | 121 |
| 减速器背隙 | arcsec | <10 | <10 | <10 | <10 | <10 | <10 | <10 |
| 传动精度 | arcmin | <1 | <1 | <1 | <1 | <1 | <1 | <1 |
| 平均寿命 | Hour | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 |
| 输出能力 | ||||||||
| 启停容许转矩 | N·m | 26 | 34 | 66 | 102 | 194/207 | 459 | 800 |
| 平均负载转矩 | N·m | 10.5 | 13.5 | 49 | 61 | 133 | 267 | 557 |
| 最大瞬时转矩 | N·m | 51 | 66 | 134 | 182 | 351/376 | 848 | 1458 |
| 最大许用弯矩 | N·m | 20 | 41 | 72 | 140 | 243 | 460 | 600 |
| 额定转速 | rpm | 30 | 30 | 19.8 | 26.7 | 29.7/24.8 | 12.4 | 16.5 |
| 最大转速 | rpm | 55 | 45 | 28.7 | 39.6 | 37.6/31.4 | 15.5 | 20 |
| 重复定位精度 | arcsec | <60 | <60 | <60 | <60 | <60 | <60 | <60 |
| 绝对定位精度 | arcsec | <200 | <200 | <200 | <200 | <200 | <200 | <200 |
| 伺服系统 | ||||||||
| 电机功率 | W | 65 | 129 | 148 | 282 | 400 | 800 | 1450 |
| 额定电压 | VDC | 48 | 48 | 48 | 48 | 48 | 48 | 48 |
| 额定电流 | A(rms) | 3.6 | 4.8 | 5.7 | 9.5 | 11.5 | 19.6 | 33.7 |
| 峰值电流 | A(rms) | 10.8 | 14.4 | 17.1 | 27.25 | 28.75 | 40 | 67.4 |
| 增量编码器 | P/R | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 | 20000 |
| 绝对值编码器 | Bit | 17 | 17 | 17 | 17 | 17 | 17 | 17 |
| 通讯协议 | -- | EtherCAT / CANopen | ||||||
| 外形尺寸 | ||||||||
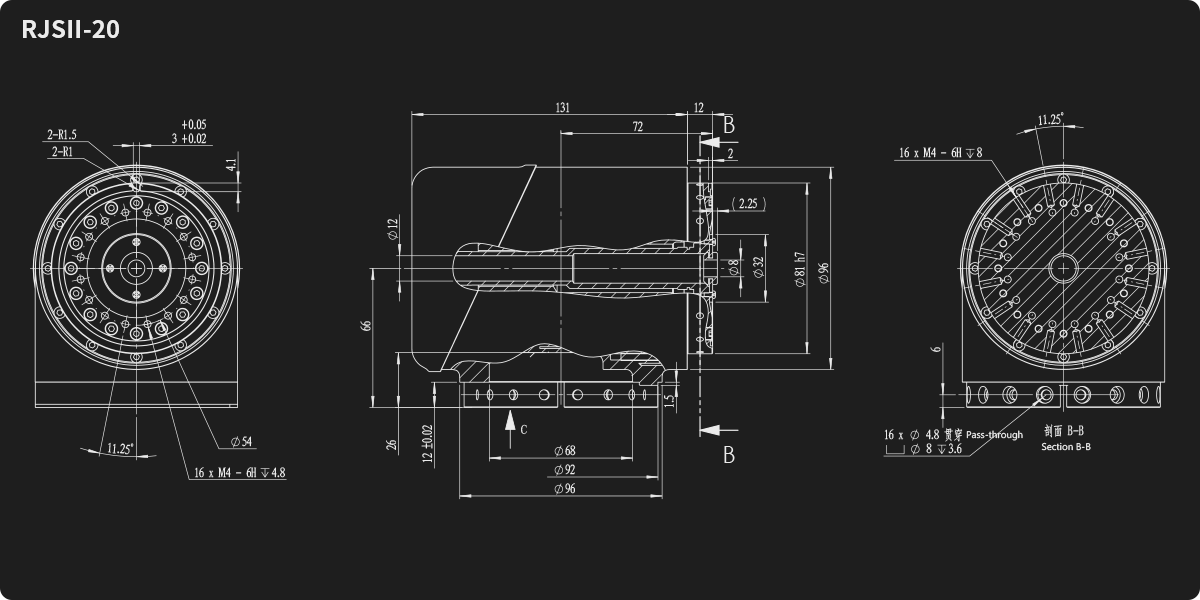
| 关节直径 | mm | 66 | 76 | 90 | 96 | 116 | 152 | 184 |
| 关节长度 | mm | 114 | 122 | 139 | 131 | 149 | 181 | 209 |
| 通孔直径 | mm | 6.5 | 7.5 | 12 | 12 | 12 | 14 | 15 |
| 关节重量 | kg | 1.04 | 1.6 | 2.6 | 3.1 | 4.5 | 8.6 | 15 |
| 其他 | ||||||||
| 抱闸 | 24/12VDC电磁摩擦式 | |||||||
| IP等级 | IP54(IP65可选) | |||||||
| 工作环境 | 运行温度:0~50°C(-40~60°C可选),存贮温度:-40~80°C,环境湿度: 90%相对湿度(无冷凝) | |||||||
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。
RJSII系列关节模组型号说明
| RJSII | -14 | -100 | -20 | B2 | -SA17 | -D6 | E | -B1 |
| 系列 | 型号 | 减速比 | 电机定子长度 | 抱闸 | 绝对值编码器 | 驱动器型号 | 默认通讯配置 | 版本号 |
| 直筒型关节 | 14S | 100-1:101 | 10 | B1:插销式抱闸 B2:电磁摩擦片式一体传统抱闸 |
S单圈M多圈 A-绝对值 17编码器 单圈位数 |
D1: RDM
D3: RDM2
D4: RTM08
D5: MJA14-RGT
D6: RGT
D10: MJA14-RDM
|
E: EtherCAT
C:CANopen
R: 485
|
B1:设计版本号 |
| 14 | 20 | |||||||
| 17 | 120-1:121 | 25.2 | ||||||
| 20 | 15.3 | |||||||
| 25 | 27 | |||||||
| 32 | 160-1:161 | 31 | ||||||
| 40 | 25 |
示例型号:
