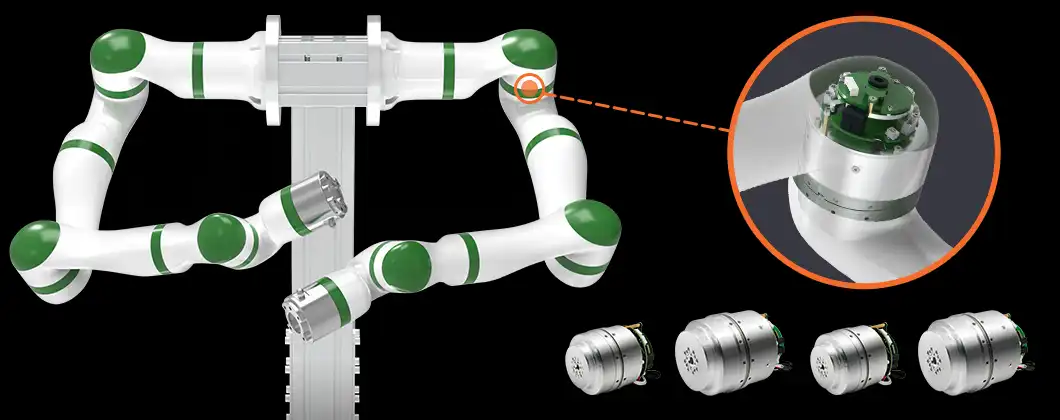
双臂协作机器人
热销精品DR系列
• 实现⼀个控制器控制两条⼿臂,⽅便部署
• 双臂14个自由度协同控制,更高效地并肩工作
• 精确的重复定位精度和路径精度
• 超轻量、尺寸小,紧凑型封装,模块化设计
• 卓越的运动控制碰撞检测,保障人员安全
• 提供产品和解决方案定制化服务
推荐应用场景具体案例 >
3C电子、生物医疗、康复医疗、半导体、智慧零售、科研教育等
- 7x2自由度
- 9.8kg最小单臂自重
- 3kg单臂最大有效负载
- ±0.03mm重复定位精度
- 2m/s末端最大速度
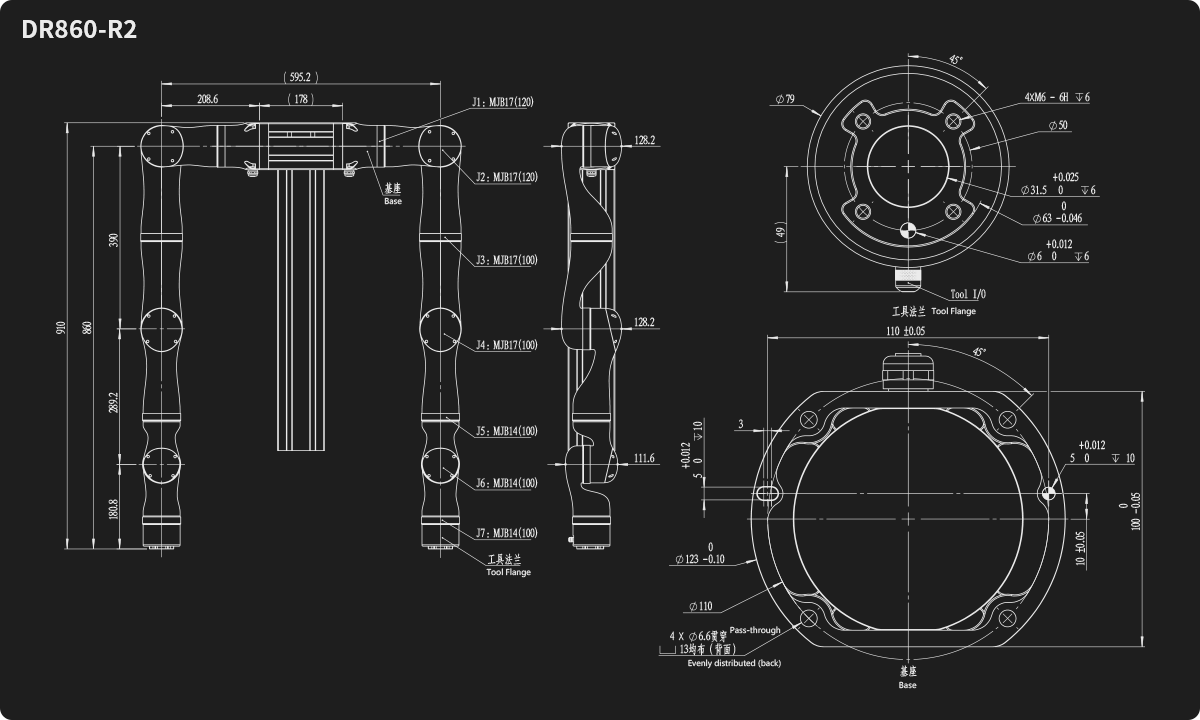
- 860mm x2最大双臂臂展
双臂协作机器人介绍视频
技术参数
| 产品特征 | ||
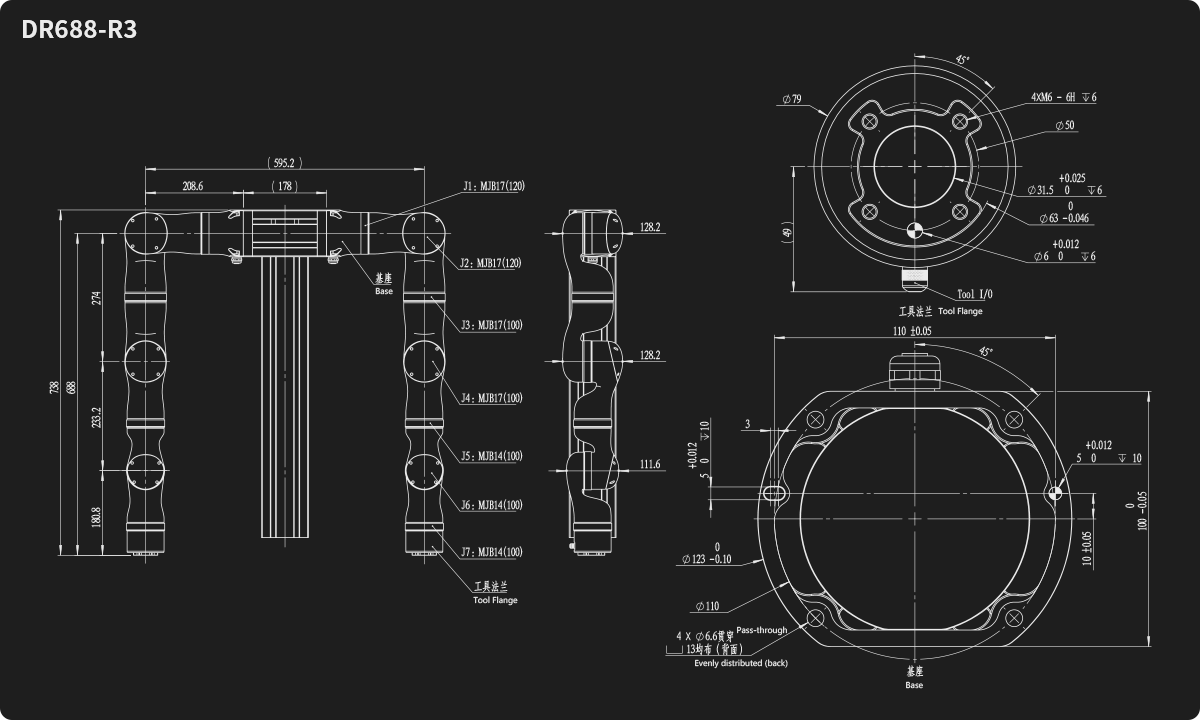
| 型号 | DR860-R2 | DR688-R3 |
| 有效负载 | 4kg (2kg×2) | 6kg (3kg×2) |
| 重复定位精度 | ±0.03mm | ±0.03mm |
| 自重 | 10kg×2(不含固定架) | 9.8kg×2(不含固定架) |
| 工作半径 | 679.2mm×2 | 507.2mm×2 |
| 自由度 | 14(7x2) | 14(7x2) |
| 编程 | 在8寸触摸屏示教器的图形用户界面上进行 | |
| 协同操作 | 根据IOS10218-1:2011进行协同操作,具备“安全适用的受监控停止”“拖动示教”以及“功率与力限制”等协作机器人安全功能 | |
| 关节参数 | ||
| 工作范围 | J1:±180° J2:±137° J3:±180° J4:±147° J5:±180° J6:±127° J7:±180° |
J1:±180° J2:±137° J3:±180° J4:±147° J5:±180° J6:±127° J7:±180° |
| 最大速度 | J1:150º/s J2:150º/s J3:180º/s J4:180º/s J5:192º/s J6:192º/s J7:192º/s |
J1:150º/s J2:150º/s J3:180º/s J4:180º/s J5:192º/s J6:192º/s J7:192º/s |
| 末端速度 | ≤2m/s | ≤2m/s |
| 抱闸类型 | 24VDC永磁式 | 24VDC永磁式 (关节1、2、3、4) |
| 性能 | ||
| 功耗 (普通工况下) | 600W | |
| 额定寿命 | 20000h | |
| 环境温度 | -20~45℃ | |
| 环境湿度 | 25~80%(无冷凝) | |
| 防护等级 | IP54 | |
| 安装方式 | 任意 | |
| 噪音 | ≤60dB | |
| 通讯协议 | EtherCAT / CANopen | |
| 供电电源 | DC 48V | |
| 材质 | 铝合金、尼龙 | |
| 底座尺寸 | φ718.2mm | |
| 工具I/O端口 | 2路数字输入,2路数字输出,2路模拟量输入 | |
| 工具I/O电源 | 24V | |
| 工具I/O电流输出 | 600mA | |
| EtherCAT输出 | 1路 | |
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。
| 控制箱 | ||
| 尺寸 | 487×236×460mm | |
| 重量 | 10kg | |
| 连接线长度 | 6m | |
| 供电电源 | 100-240VAC 50-60Hz | |
| 防护等级 | IP54 | |
| 主控制器 | X86架构,Linux实时操作系统 | |
| 扩展通讯协议 | TCP/IP,Modbus TCP/RTU(RS485) | |
| 控制箱I/O接口 | ||
| 普通I/O | ||
| 数字量输入 | 24 | |
| 数字量输出 | 24 | |
| I/O电源 | 24V 5A | |
| 示教器 | ||
| 尺寸 | 280×199.1×70.7mm | |
| 重量 | 1.2kg | |
| 显示器 | 8寸电阻式彩色液晶TFT触控屏,800*600像素 | |
| 连接线长度 | 4.5m | |
| 防护等级 | IP65 | |
注: 提供OEM/ODM定制化服务,如您有其它技术要求,请联系我们咨询。