最新发布!泰科机器人发布首款自研双足人形机器人!
Date:2025-08-26作为机器人核心零部件领域的领先企业之一,泰科机器人凭借十多年的技术积淀与持续创新,已成功推出多款高性能人形机器人四肢的解决方案。今天,泰科机器人再次迎来重大突破——首款自主研发的双足人形机器人硬件本体正式发布!这一突破标志着泰科机器人在核心技术转化与人形机器人应用领域迈出关键一步。
一、核心亮点速览
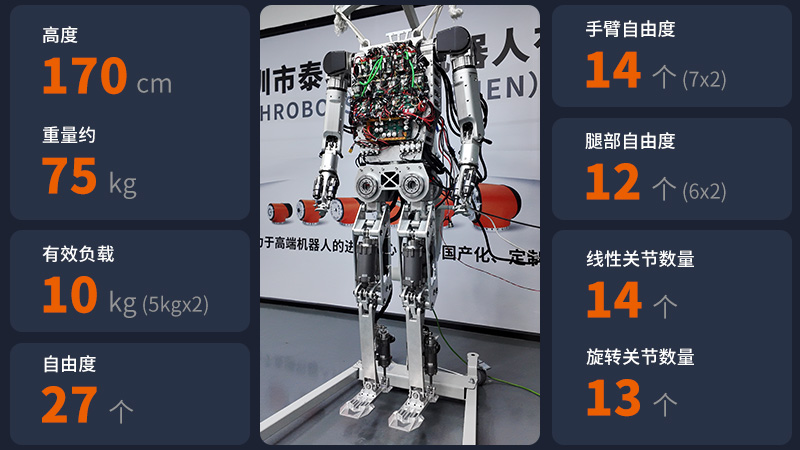
• 高度:170cm
• 重量:75kg
• 高灵活运动系统:全身27个自由度,其中双臂14个自由度。含14个HJL高推力线性关节+13个MJBX带力控旋转关节,实现类人灵巧运动
• 卓越负载能力:单臂负载可达5kg,双臂协同负载可达10kg
• 强劲动力性能:最大旋转关节扭矩≥200N·m,直线关节最大推力8000N,最快行走时速≥12km/h,最大线性速≥500mm/s
• 严苛环境适应:工作温度-20℃~60℃,全金属传动结构,防护等级IP54
• 全自研关键技术:核心关节模组全自研组装生产、伺服驱动系统100%自主研发,支持EtherCAT通信与控制系统二次开发。
二、创新技术解析
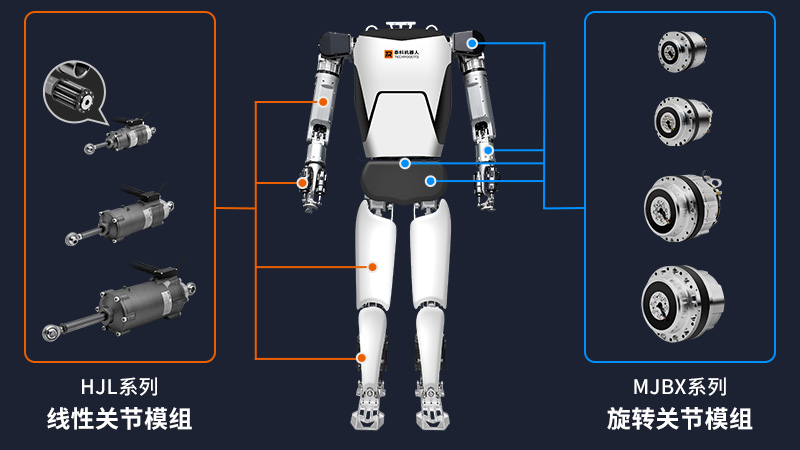
1. 混合关节构型设计
泰科机器人采用HJL系列线性关节+MJBX系列带力控旋转关节的混合构型,充分发挥两类关节优势:
• HJL系列线性关节:提供高刚度轴向支撑与爆发力,适用于手臂伸缩及足部驱动以及躯干升降。
• MJBX系列带力控旋转关节:具备抗扭转能力与球面运动灵活性,适用于肩、肘等部位的多角度转动。
2. 高性能运动系统
• 上肢协同系统:旋转与线性关节协同工作,实现双臂精准协作。
• 下肢驱动系统:全线性关节方案,行星滚柱丝杠传动。
• 腰部稳定系统:大扭矩旋转关节,集成抗扰动算法与自适应惯量补偿技术,有效抑制动态运动中的上身摆动。
3. 全自研核心技术平台
• 核心关节模组:
HJL系列线性关节:最大推力8000N,最小重量仅0.5kg,适用于双足及小臂。
MJBX旋转关节:最大扭矩133N·m,最小重量仅0.84kg,适用于肩、肘、腕部。
• 伺服驱动系统:
支持EtherCAT/CANopen实时通信,电流环带宽达2KHz,转换效率可达95%。
宽温域设计(-45℃~70℃可选),抗震动冲击,适配复杂环境。
4. 智能控制系统
搭载X1000具身小脑(南京贞实科技),提供核心运动控制算法+部分软件开源全栈解决方案,支持动态平衡、复杂运动规划及二次开发。
三、技术积淀与行业影响
• 16年伺服技术研发经验,30+项专利知识产权
• 伺服驱动模块高性能、高功率密度、高转换效率,性能业内领先
• 自研人形机器人关节模组轻量化、一体化,技术领跑行业
• 机械臂可加力控、抱闸、六维力传感器,提供OEM/ODM定制服务,聚焦工业应用场景落地
四、结语
泰科机器人首款双足人形机器人的发布,既是公司多年技术沉淀与研发实力厚积薄发的集中印证,更标志着其在智能机器人核心领域实现从 “技术探索” 到 “全面进阶” 的关键跨越。面向未来,泰科机器人将持续与AI+应用伙伴深耕双足人形机器人的场景化应用落地,以技术创新驱动产品迭代,助力智能机器人行业加速迈向更高效、更智能的发展新纪元!
