-
 2025-05-07 公司新闻
2025-05-07 公司新闻致谢每一份相遇!泰科机器人在FAIR plus 2025的收获与成长
-
 2025-04-17 公司新闻
2025-04-17 公司新闻FAIR plus 2025,泰科机器人邀您共赴人形机器人产业盛宴
-
 2025-04-07 公司新闻
2025-04-07 公司新闻余热未消!回顾“2025年深圳工业展”的那些高光瞬间
-
 2025-03-19 公司新闻
2025-03-19 公司新闻展会倒计时!泰科机器人带您解锁行业新机遇!
-
 2025-01-15 产品动态
2025-01-15 产品动态未来已来,2025人形机器人量产启航!泰科机器人成功斩获近千万订单
-
 2025-01-10 公司新闻
2025-01-10 公司新闻祝贺!泰科机器人荣获2024年度机器人核心技术创新奖
-
 2024-12-26 公司新闻
2024-12-26 公司新闻泰科机器人荣获第二届特种机器人产业链揭榜推进活动“优胜单位”
-
 2024-12-04 公司新闻
2024-12-04 公司新闻泰科机器人获奖,开启人形机器人关节模组新动力
-
 2024-10-29 行业新闻
2024-10-29 行业新闻力传感器如何让人形机器人关节智能提升
-
 2024-10-24 行业新闻
2024-10-24 行业新闻协作机器人:重塑未来工作环境的新伙伴
-
 2024-09-05 行业新闻
2024-09-05 行业新闻机器人关节模组为何选择双编码器设计?
-
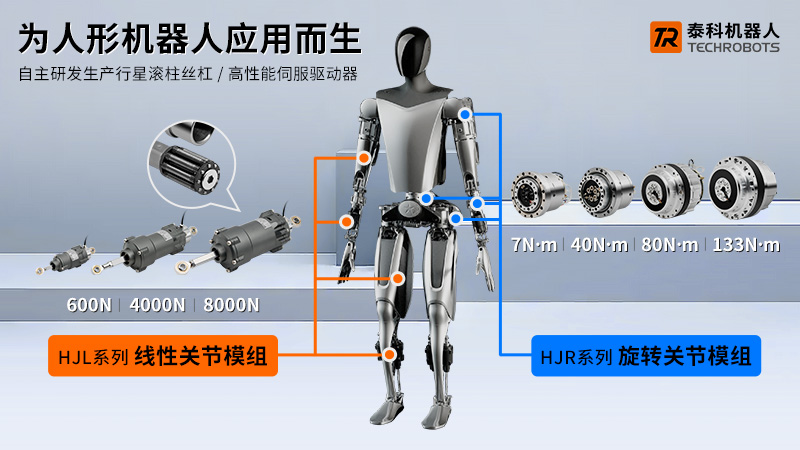 2024-08-30 产品动态
2024-08-30 产品动态专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!